Products for USB Sensing and Control


Quantity Available: 962
| Qty | Price |
|---|---|
| 10 | $80.75 |
| 25 | $72.25 |
| 50 | $63.75 |
| 100 | $59.50 |

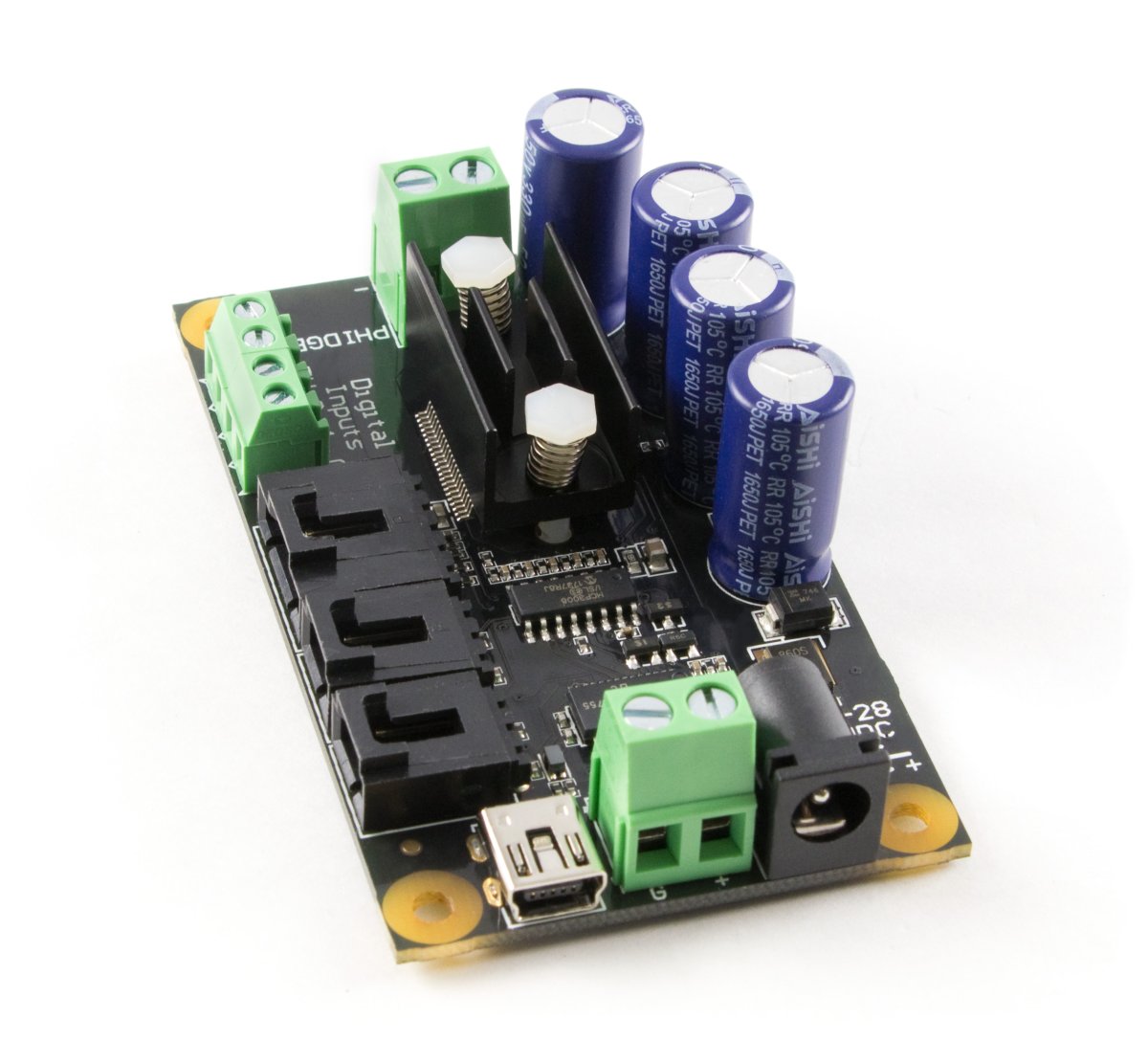
The 1065 lets you control the direction, velocity and acceleration of one DC Motor. The motor is powered by an external power supply (9 to 28VDC).
Brushed DC Motors are very simple to understand, but very difficult to control precisely. By applying a voltage, or pulsing a voltage rapidly, current flows through the motor and it will begin rotating. Depending on the direction of the current, the motor will rotate clockwise or counterclockwise. By switching the voltage very quickly (a technique called PWM), the 1065 changes the effective voltage by changing the percentage of time the full supply voltage is applied to the motor.
Precise control of DC motors can be achieved by using encoders. You can implement control loops in software by using the data provided by the on-board digital inputs, analog inputs and encoder input.
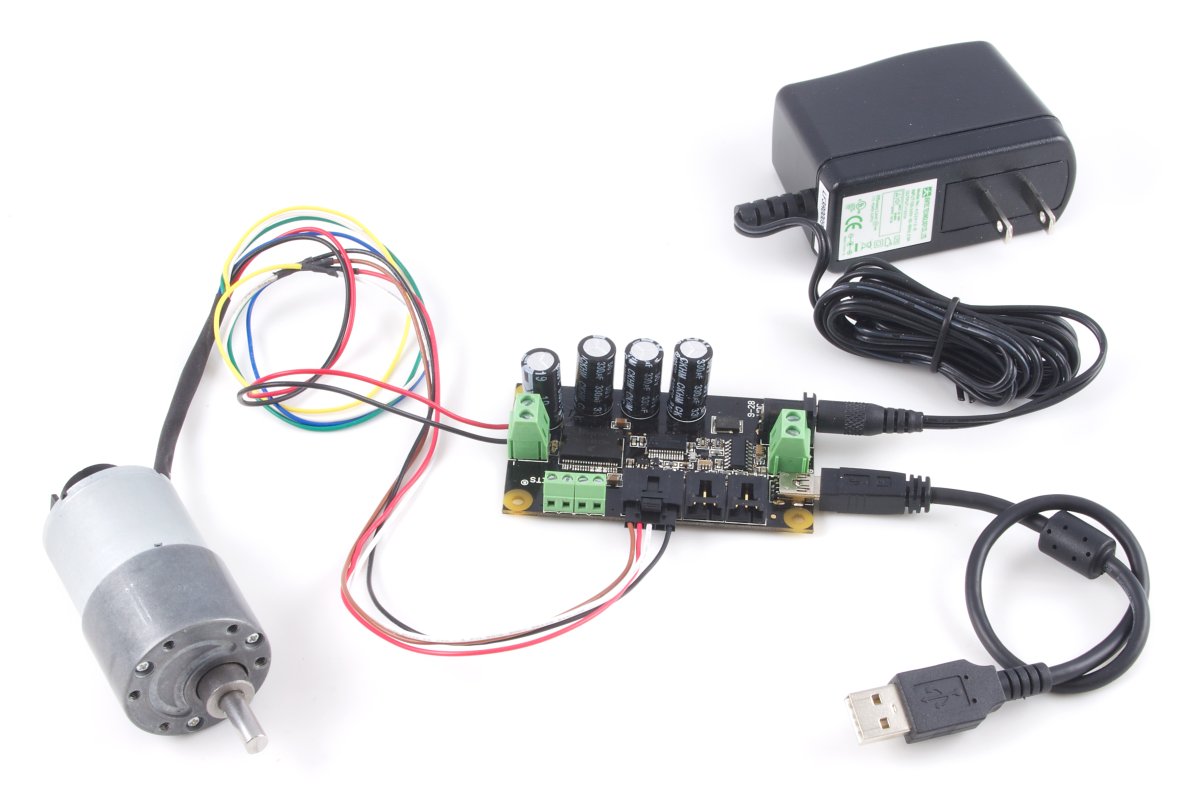
Welcome to the 1065 user guide! In order to get started, make sure you have the following hardware on hand:
Next, you will need to connect the pieces:
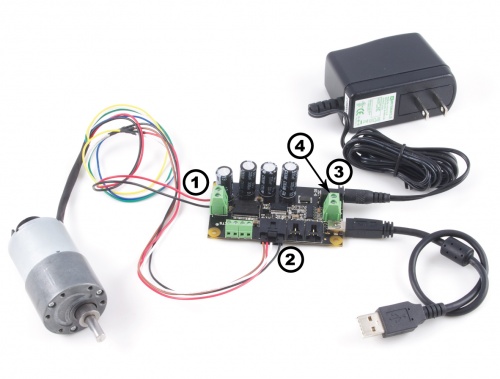
Now that you have everything together, let's start using the 1065!
In order to demonstrate the functionality of the 1065, the Phidget Control Panel running on a Windows machine will be used.
The Phidget Control Panel is available for use on both macOS and Windows machines.
To open the Phidget Control Panel on Windows, find the ![]() icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
To open the Phidget Control Panel on macOS, open Finder and navigate to the Phidget Control Panel in the Applications list. Double click on the ![]() icon to bring up the Phidget Control Panel.
icon to bring up the Phidget Control Panel.
For more information, take a look at the getting started guide for your operating system:
Linux users can follow the getting started with Linux guide and continue reading here for more information about the 1065.
After plugging the 1065 into your computer and opening the Phidget Control Panel, you will see something like this:
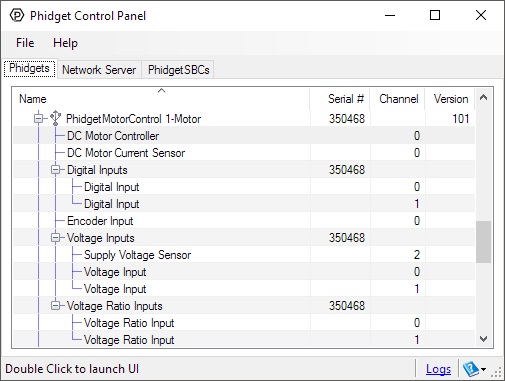
The Phidget Control Panel will list all connected Phidgets and associated objects, as well as the following information:
The Phidget Control Panel can also be used to test your device. Double-clicking on an object will open an example.
Double-click on the DC Motor object, labelled DC Motor Controller, in order to run the example:
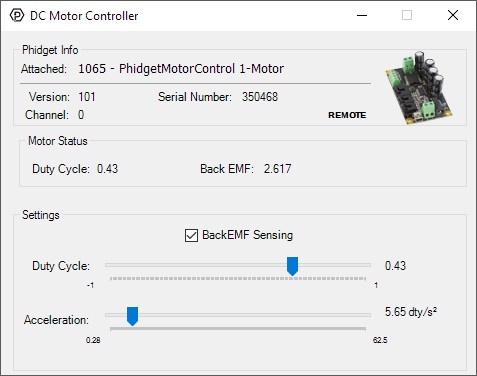
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
Double-click on the Encoder object, labelled Encoder Input, in order to run the example:
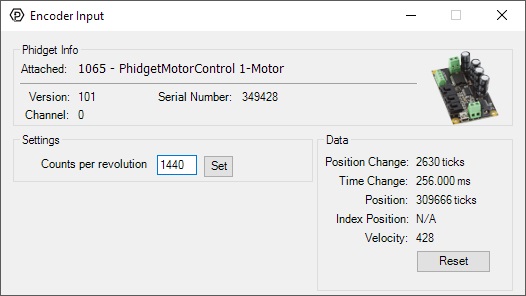
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
Double-click on the Current Input object , labelled DC Motor Current Sensor, in order to run the example:
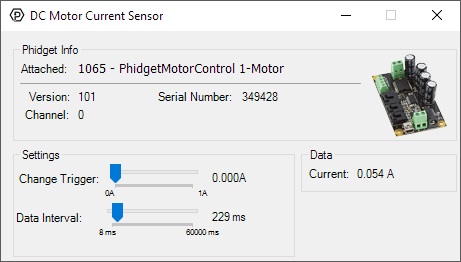
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
Double-click on a Digital Input object in order to run the example:
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
For more information about Digital Inputs, take a look at the Digital Input Primer
Double-click on the Voltage Input object, lablled Supply Voltage Sensor, in order to run the example:
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
Double-click on a Voltage Input object in order to run the example:
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
For more information about Voltage Inputs, check out the Voltage Input Primer.
Double-click on a Voltage Ratio Input object in order to run the example:
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
For more information about Voltage Ratio Inputs, check out the Voltage Ratio Input Primer.
Before you can access the device in your own code, and from our examples, you'll need to take note of the addressing parameters for your Phidget. These will indicate how the Phidget is physically connected to your application. For simplicity, these parameters can be found by clicking the button at the top of the Control Panel example for that Phidget.

In the Addressing Information window, the section above the line displays information you will need to connect to your Phidget from any application. In particular, note the Channel Class field as this will be the API you will need to use with your Phidget, and the type of example you should use to get started with it. The section below the line provides information about the network the Phidget is connected on if it is attached remotely. Keep track of these parameters moving forward, as you will need them once you start running our examples or your own code.

You are now ready to start writing your own code for the device. The best way to do that is to start from our Code Samples.
Select your programming language of choice from the drop-down list to get an example for your device. You can use the options provided to further customize the example to best suit your needs.
Once you have your example, you will need to follow the instructions on the page for your programming language to get it running. To find these instructions, select your programming language from the Programming Languages page.
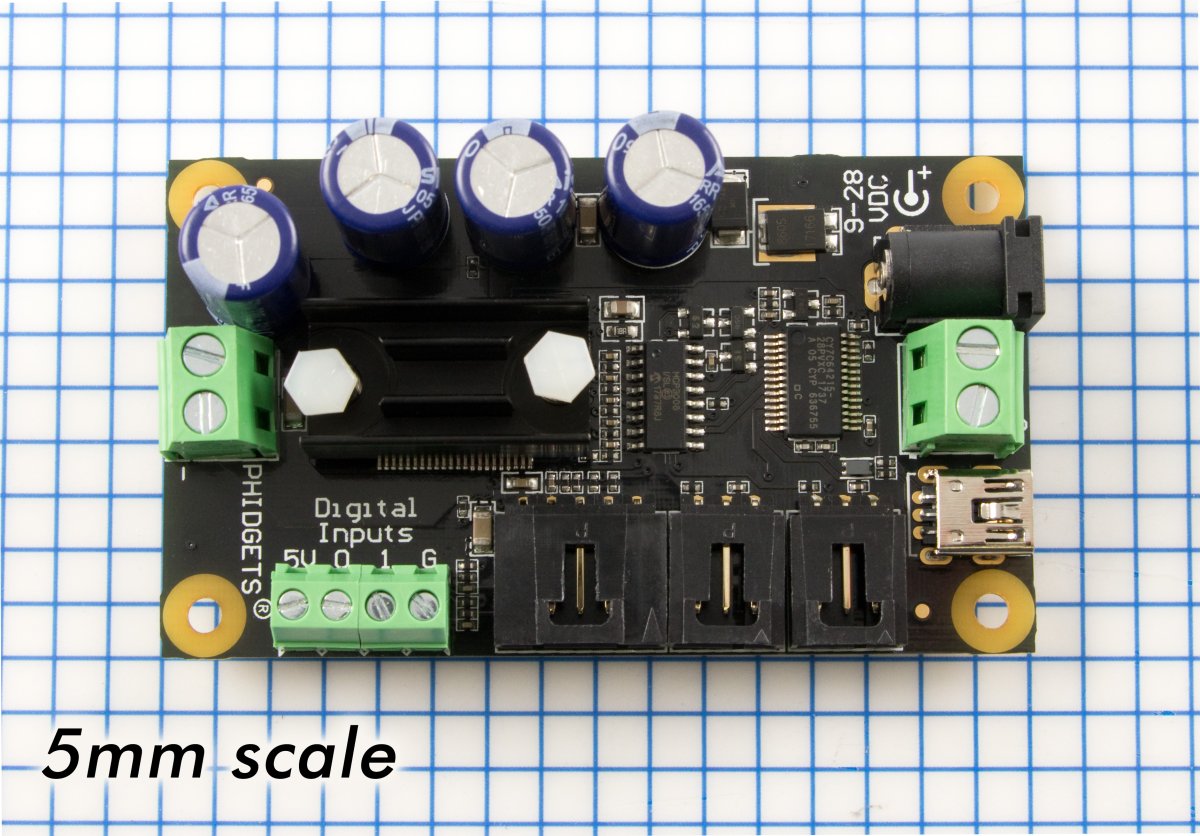
The ports and terminal blocks on this board are labelled on the underside to save space:

For more information on the analog inputs on the 1065, check the Analog Input Guide.
For more information about encoders, check the Encoder Guide.
For more information about DC motors and how to control them, check the DC Motor and Controller Guide.
| Part Number | 1065_1B |
| Controller Properties | |
|---|---|
| API Object Name | MotorControl |
| Motor Type | DC Motor |
| Number of Motor Ports | 1 |
| Velocity Resolution | 0.39 Duty Cycle |
| Acceleration Resolution | 24.5 Duty Cycle/s |
| Acceleration Min | 24.5 Duty Cycle/s |
| Acceleration Max | 6250 Duty Cycle/s |
| Acceleration Time Min | 31.3 ms |
| Acceleration Time Max | 8.2 s |
| Board Properties | |
| Controlled By | USB (Mini-USB) |
| USB Stack | HID |
| Driver Support | Phidget21, Phidget22 |
| API Object Name | DCMotor |
| Encoder Interface | |
| Number of Encoder Inputs | 1 |
| Count Rate Max | 2E+06 pulses/s |
| Encoder Interface Resolution | x1 |
| Sampling Interval Min | 8 ms/sample |
| Time Resolution | 0.33 ms |
| Encoder Input Low Voltage Max | 800 mV DC |
| Encoder Input High Voltage Min | 2.1 V DC |
| Encoder Pull-up Resistance | 2.4 kΩ |
| Electrical Properties | |
| Supply Voltage Min | 9 V DC |
| Supply Voltage Max | 28 V DC |
| Continuous Motor Current Max | 5 A |
| Overcurrent Trigger | 8 A |
| Current Consumption Min | 20 mA |
| Current Consumption Max | 100 mA |
| USB Speed | Full Speed |
| Physical Properties | |
| Recommended Wire Size (Power Terminal) | 12 - 24 AWG |
| Operating Temperature Min | 0 °C |
| Operating Temperature Max | 70 °C |
| Voltage Inputs | |
| Number of Voltage Inputs | 2 |
| Input Impedance | 900 kΩ |
| 5V Reference Error Max | 0.5 % |
| Update Rate | 125 samples/s |
| Digital Inputs | |
| Number of Digital Inputs | 2 |
| Digital Input Type | Active Low |
| Pull-up Resistance | 15 kΩ |
| Low Voltage Max (True) | 800 mV DC |
| High Voltage Min (False) | 2.1 V DC |
| Low Voltage Trigger Length Min | 4 s |
| High Voltage Trigger Length Min | 16 s |
| Digital Input Voltage Max | ± 15 V DC |
| Digital Input Update Rate | 125 samples/s |
| Recommended Wire Size | 16 - 26 AWG |
| Customs Information | |
| Canadian HS Export Code | 8471.80.00 |
| American HTS Import Code | 8471.80.40.00 |
| Country of Origin | CN (China) |
| Date | Board Revision | Device Version | Packaging Revision | Comment |
|---|---|---|---|---|
| June 2011 | 0 | 100 | Product Release | |
| June 2011 | 0 | 101 | getLabelString fixed for labels longer than 7 characters | |
| October 2017 | 0 | 101 | B | Removed USB cable from packaging |
| September 2018 | 1 | 101 | B | Added heatsink |
| API | Detail | Language | OS | |
|---|---|---|---|---|
| DCMotor | Visual Studio GUI | C# | Windows | Download |
| DCMotor | Objective-C | macOS | Download | |
| DCMotor | Swift | macOS | Download | |
| DCMotor | Swift | iOS | Download | |
| DCMotor | Visual Basic | Windows | Download | |
| DCMotor | Max | Multiple | Download | |
| DigitalInput | Visual Studio GUI | C# | Windows | Download |
| DigitalInput | Objective-C | macOS | Download | |
| DigitalInput | Swift | macOS | Download | |
| DigitalInput | Swift | iOS | Download | |
| DigitalInput | Visual Basic | Windows | Download | |
| DigitalInput | Max | Multiple | Download | |
| Encoder | Visual Studio GUI | C# | Windows | Download |
| Encoder | Objective-C | macOS | Download | |
| Encoder | Swift | macOS | Download | |
| Encoder | Swift | iOS | Download | |
| Encoder | Visual Basic | Windows | Download | |
| Encoder | Max | Multiple | Download | |
| VoltageInput | Visual Studio GUI | C# | Windows | Download |
| VoltageInput | Objective-C | macOS | Download | |
| VoltageInput | Swift | macOS | Download | |
| VoltageInput | Swift | iOS | Download | |
| VoltageInput | Visual Basic | Windows | Download | |
| VoltageInput | Max | Multiple | Download | |
| VoltageRatioInput | Visual Studio GUI | C# | Windows | Download |
| VoltageRatioInput | Load Cell Calibrator | C# | Windows | Download |
| VoltageRatioInput | Objective-C | macOS | Download | |
| VoltageRatioInput | Swift | macOS | Download | |
| VoltageRatioInput | Swift | iOS | Download | |
| VoltageRatioInput | Visual Basic | Windows | Download | |
| VoltageRatioInput | Max | Multiple | Download | |
| CurrentInput | Visual Studio GUI | C# | Windows | Download |
| CurrentInput | Objective-C | macOS | Download | |
| CurrentInput | Swift | macOS | Download | |
| CurrentInput | Swift | iOS | Download | |
| CurrentInput | Visual Basic | Windows | Download | |
| CurrentInput | Max | Multiple | Download |
| Channel Name | API | Channel |
|---|---|---|
| DC Motor Controller | DCMotor | 0 |
| Digital Input | DigitalInput | 0 - 1 |
| Encoder Input | Encoder | 0 |
| Voltage Input | VoltageInput | 0 - 1 |
| Supply Voltage Sensor | VoltageInput | 2 |
| Voltage Ratio Input | VoltageRatioInput | 0 - 1 |
| DC Motor Current Sensor | CurrentInput | 0 |
We do not carry enclosures for the 1065, because motor controllers are prone to overheating when kept in enclosed spaces for extended periods of time with no airflow.
We offer a wide variety of DC motors that can be used with this Phidget. Motors with higher gearbox ratios will have higher torque at the cost of lower speed. If you want a motor that has an encoder attached to it, skip ahead to the next table.
| Product | Motor Properties | Physical Properties | Gearbox Specifications | ||||
|---|---|---|---|---|---|---|---|
| Part Number | Price | Rated Speed | Rated Torque | Shaft Diameter | Weight | Gear Ratio | Gearbox Type |
 12V/0.2Kg-cm/1080RPM 3.7:1 DC Gear Motor
|
$18.00 | 1080 RPM | 240 g·cm | 6 mm | 144 g | 3 12⁄17 : 1 | Planetary |
 12V/0.2Kg-cm/230RPM 10:1 DC Gear Motor
|
$10.00 | 230 RPM | 200 g·cm | 6 mm | 128 g | 10 : 1 | Spur |
 12V/0.9Kg-cm/285RPM 14:1 DC Gear Motor
|
$18.00 | 285 RPM | 900 g·cm | 6 mm | 170 g | 13 212⁄289 : 1 | Planetary |
 12V/0.3Kg-cm/127RPM 18:1 DC Gear Motor
|
$10.00 | 127 RPM | 310 g·cm | 6 mm | 133 g | 18 : 1 | Spur |
 12V/0.8Kg-cm/46RPM 50:1 DC Gear Motor
|
$11.00 | 46 RPM | 820 g·cm | 6 mm | 137 g | 50 : 1 | Spur |
 12V/1.6Kg-cm/23RPM 100:1 DC Gear Motor
|
$11.00 | 23 RPM | 1.6 kg·cm | 6 mm | 136 g | 100 : 1 | Spur |
 12V/0.5Kg-cm/670RPM 3.7:1 DC Gear Motor
|
$38.00 | 670 RPM | 540 g·cm | 8 mm | 416 g | 3 12⁄17 : 1 | Planetary |
 12V/1.9Kg-cm/175RPM 14:1 DC Gear Motor
|
$42.00 | 175 RPM | 1.9 kg·cm | 8 mm | 464 g | 13 212⁄289 : 1 | Planetary |
 12V/6.6Kg-cm/49RPM 51:1 DC Gear Motor
|
$43.00 | 49 RPM | 6.6 kg·cm | 8 mm | 526 g | 50 801⁄895 : 1 | Planetary |
 12V/6.6Kg-cm/49RPM 51:1 DC Gear Motor
|
$33.00 | 49 RPM | 6.6 kg·cm | 8 mm | 526 g | 50 801⁄895 : 1 | Planetary |
 12V/17.3Kg-cm/18RPM 139:1 DC Gear Motor
|
$43.00 | 18 RPM | 17.3 kg·cm | 8 mm | 526 g | * 139 184⁄1221 : 1 | Planetary |
 24V/2.5Kg-cm/3280RPM DC Motor
|
$40.00 | 3280 RPM | 3.3 kg·cm | 8 mm | 1.4 kg | — | — |
 24V/7Kg-cm/3000RPM DC Motor
|
$50.00 | 2800 RPM | 7.1 kg·cm | 10 mm | 2.7 kg | — | — |
 24V/9.6Kg-cm/3200RPM DC Motor
|
$60.00 | 2900 RPM | 9.7 kg·cm | 10 mm | 3.3 kg | — | — |
 24V/5.1Kg-cm/588RPM 4.25:1 DC Gear Motor
|
$69.00 | 588 RPM | 4.4 kg·cm | 12 mm | 1.3 kg | 4 1⁄4 : 1 | Planetary |
 24V/12.2Kg-cm/772RPM/4.25:1 DC Gear Motor
|
$80.00 | 772 RPM | 12.2 kg·cm | 12 mm | 1.9 kg | 4 1⁄4 : 1 | Planetary |
 24V/14.2Kg-cm/192RPM 13:1 DC Gear Motor
|
$66.00 | 192 RPM | 13.3 kg·cm | 12 mm | 1.5 kg | 12 24⁄25 : 1 | Planetary |
 24V/45Kg-cm/182RPM/18:1 DC Gear Motor
|
$82.00 | 182 RPM | 47 kg·cm | 12 mm | 2.1 kg | 18 : 1 | Planetary |
 24V/50.9Kg-cm/53RPM 47:1 DC Gear Motor
|
$72.00 | 53 RPM | 43.8 kg·cm | 12 mm | 1.7 kg | 46 82⁄125 : 1 | Planetary |
 24V/153Kg-cm/50RPM/65:1 DC Gear Motor
|
$84.00 | 50 RPM | 153 kg·cm | 12 mm | 2.2 kg | 65 : 1 | Planetary |
 24V/82.6Kg-cm/33RPM 76:1 DC Gear Motor
|
$72.00 | 33 RPM | 71.4 kg·cm | 12 mm | 1.7 kg | 76 49⁄64 : 1 | Planetary |
 24V/173.3Kg-cm/15RPM 168:1 DC Gear Motor
|
$76.00 | 15 RPM | 136.6 kg·cm | 12 mm | 2 kg | 167 601⁄625 : 1 | Planetary |
Linear actuators are simply DC motors that are hooked up to a linear screw which causes the shaft to move laterally instead of rotating. Unlike a rotary DC motor, linear actuators have a minimum and maximum position at which the shaft cannot contract or extend any further. On its own, the motor would not be smart enough to stop before attempting to push beyond these limits, possibly damaging the motor. That's why each linear actuator also has a built-in feedback potentiometer so you can monitor the position of the shaft and prevent the actuator from stalling out at its limits. The potentiometer can be read by the analog input on the 1065.
| Product | Motor Properties | Electrical Properties | Physical Properties | |||||
|---|---|---|---|---|---|---|---|---|
| Part Number | Price | Stroke Length | Maximum Speed | Peak Power Point | Peak Efficiency Point | Gear Ratio | Rated Voltage | Weight |
 DC Linear Actuator - 30mm - 18N
|
$40.00 | 30 mm | 50 mm/s | 18 N | — | — | 12 V DC | 63.6 g |
 DC Linear Actuator - 30mm - 60N
|
$40.00 | 30 mm | 15 mm/s | 60 N | — | — | 12 V DC | 69.9 g |
 DC Linear Actuator - 50mm - 50N
|
$80.00 | 50 mm | 32 mm/s | (@ 16 mm/s) 50 N | (@ 24 mm/s) 24 N | 35 : 1 | 12 V DC | 56 g |
 DC Linear Actuator - 50mm - 75N
|
$80.00 | 50 mm | 20 mm/s | (@ 10 mm/s) 75 N | (@ 15 mm/s) 38 N | 63 : 1 | 12 V DC | 56 g |
 DC Linear Actuator - 50mm - 175N
|
$80.00 | 50 mm | 8 mm/s | (@ 4 mm/s) 175 N | (@ 7 mm/s) 75 N | 150 : 1 | 12 V DC | 56 g |
 DC Linear Actuator - 100mm - 18N
|
$40.00 | 100 mm | 50 mm/s | 18 N | — | — | 12 V DC | 94.3 g |
 DC Linear Actuator - 100mm - 50N
|
$80.00 | 100 mm | 32 mm/s | (@ 16 mm/s) 50 N | (@ 24 mm/s) 24 N | 35 : 1 | 12 V DC | 74 g |
 DC Linear Actuator - 100mm - 60N
|
$40.00 | 100 mm | 15 mm/s | 60 N | — | — | 12 V DC | 93.9 g |
 DC Linear Actuator - 100mm - 75N
|
$80.00 | 100 mm | 20 mm/s | (@ 10 mm/s) 75 N | (@ 15 mm/s) 38 N | 63 : 1 | 12 V DC | 74 g |
 DC Linear Actuator - 100mm - 175N
|
$80.00 | 100 mm | 8 mm/s | (@ 4 mm/s) 175 N | (@ 7 mm/s) 75 N | 150 : 1 | 12 V DC | 74 g |
 DC Linear Actuator - 140mm - 50N
|
$80.00 | 140 mm | 32 mm/s | (@ 16 mm/s) 50 N | (@ 24 mm/s) 24 N | 35 : 1 | 12 V DC | 84 g |
 DC Linear Actuator - 140mm - 75N
|
$80.00 | 140 mm | 20 mm/s | (@ 10 mm/s) 75 N | (@ 15 mm/s) 38 N | 63 : 1 | 12 V DC | 84 g |
 DC Linear Actuator - 140mm - 175N
|
$80.00 | 140 mm | 8 mm/s | (@ 4 mm/s) 175 N | (@ 7 mm/s) 75 N | 150 : 1 | 12 V DC | 84 g |
This Phidget requires a power supply between 9 and 28V DC. We recommend that you use a 12V DC power supply for smaller motors and a 24V supply for larger motors. Check your motor's specifications if you're not sure. For best performance, you should get a 5 amp supply. Select the power supply from the list below that matches your region's wall socket type.
| Product | Electrical Properties | Physical Properties | ||
|---|---|---|---|---|
| Part Number | Price | Power Supply Current | Output Voltage | Wall Plug Style |
 Power Supply 24VDC 14.6A
|
$40.00 | 14.6 A | 24 V | — |
 Power Supply 24VDC 25A Current Limiting
|
$120.00 | 25 A | 24 V | — |
 Power Supply 12VDC 0.5A - EU
|
$1.50 | 500 mA | 12 V | European |
 Power Supply 12VDC 0.5A - US
|
$1.50 | 500 mA | 12 V | North American |
 Power Supply 12VDC 2.0A - AU
|
$10.00 | 2 A | 12 V | Australian |
 Power Supply 12VDC 2.0A - EU
|
$10.00 | 2 A | 12 V | European |
 Power Supply 12VDC 2.0A - UK
|
$10.00 | 2 A | 12 V | British |
 Power Supply 12VDC 5A
|
$20.00 | 5 A | 12 V | — |
 Power Supply 24VDC 1.0A - US
|
$10.00 | 1 A | 24 V | North American |
 Power Supply 24VDC 2.5A
|
$20.00 | 2.5 A | 24 V | — |
 Power Supply 24VDC 5A
|
$40.00 | 5 A | 24 V | — |
 Power Supply-12VDC 2.0A - US
|
$10.00 | 2 A | 12 V | North American |
Use a USB cable to connect this Phidget to your computer. We have a number of different lengths available, although the maximum length of a USB cable is 5 meters due to limitations in the timing protocol. For longer distances, we recommend that you use a Single Board Computer to control the Phidget remotely.
| Product | Physical Properties | |||
|---|---|---|---|---|
| Part Number | Price | Connector A | Connector B | Cable Length |
 USB-A to Mini-B Cable 28cm 24AWG
|
$3.00 | USB Type A | USB Mini-B | 280 mm |
 USB-A to Mini-B Cable 28cm Right Angle
|
$3.50 | USB Type A | USB Mini-B (90 degree) | 280 mm |
 USB-A to Mini-B Cable 60cm 24AWG
|
$3.50 | USB Type A | USB Mini-B | 600 mm |
 USB-A to Mini-B Cable 83cm Right Angle
|
$4.50 | USB Type A | USB Mini-B (90 degree) | 830 mm |
 USB-A to Mini-B Cable 120cm 24AWG
|
$4.00 | USB Type A | USB Mini-B | 1.2 m |
 USB-A to Mini-B Cable 180cm 24AWG
|
$4.00 | USB Type A | USB Mini-B | 1.8 m |
 USB-A to Mini-B Cable 450cm, 20 AWG 2C
|
$12.00 | USB Type A | USB Mini-B | 4.5 m |
 USB-C to Mini-B Cable 60cm 24AWG
|
$5.00 | USB Type C | USB Mini-B | 600 mm |
 USB-C to Mini-B Cable 180cm 24AWG
|
$6.00 | USB Type C | USB Mini-B | 1.8 m |
| Product | Controller Properties | Electrical Properties | Board Properties | ||
|---|---|---|---|---|---|
| Part Number | Price | Number of Motor Ports | Velocity Resolution | Continuous Motor Current Max | Controlled By |
 30V 50A DC Motor Phidget
|
$150.00 | 1 | 0.00078 Duty Cycle | 50 A | VINT |
 DC Motor Phidget
|
$85.00 | 1 | 0.001 Duty Cycle | 25 A | VINT |
 2x DC Motor Phidget
|
$65.00 | 2 | 0.001 Duty Cycle | (per motor) 4 A | VINT |
 4A DC Motor Phidget
|
$45.00 | 1 | 0.001 Duty Cycle | 4 A | VINT |
 PhidgetMotorControl 1-Motor
|
$85.00 | 1 | 0.39 Duty Cycle | 5 A | USB (Mini-USB) |
 PhidgetMotorControl HC
|
$115.00 | 2 | 0.79 Duty Cycle | (per motor) 14 A | USB (Mini-USB) |
Contact us for other compliance-related inquires.


