Products for USB Sensing and Control




The 3271 is a 24 volt gear motor, generating 20.4 Kg-cm of torque at 139 RPM. It's a large motor that provides lots of torque, even at higher speeds.
The planetary gearbox on this motor is more sophisticated than a typical spur gearbox and will provide greater efficiency, higher torque, and quieter motor operation.
This revision of the 3271 has had its rear shaft and mounting holes changed to be compatible with the 3531 - Optical Rotary Encoder HKT22.
| Motor Properties | |
|---|---|
| Motor Type | DC Motor |
| Output Power (Mechanical) | 30 W |
| Rated Speed | 139 RPM |
| Rated Torque | 20.4 kg·cm |
| Stall Torque | 132 kg·cm |
| Electrical Properties | |
| Rated Voltage | 24 V DC |
| Rated Current | 2.2 A |
| Stall Current | 10.8 A |
| Physical Properties | |
| Shaft Diameter | 12 mm |
| Wire Length | 300 mm |
| Weight | 1.5 kg |
| Gearbox Specifications | |
| Gearbox Type | Planetary |
| Gear Ratio | 18 1⁄16 : 1 |
| Number of Gear Trains | 2 |
| Maximum Strength of Gears | 153 kg·cm |
| Shaft Maximum Axial Load | 200 N |
| Shaft Maximum Radial Load | 100 N |
| Backlash Error | 3° |
| Customs Information | |
| Canadian HS Export Code | 8501.10.00 |
| American HTS Import Code | 8501.10.60.60 |
| Country of Origin | CN (China) |
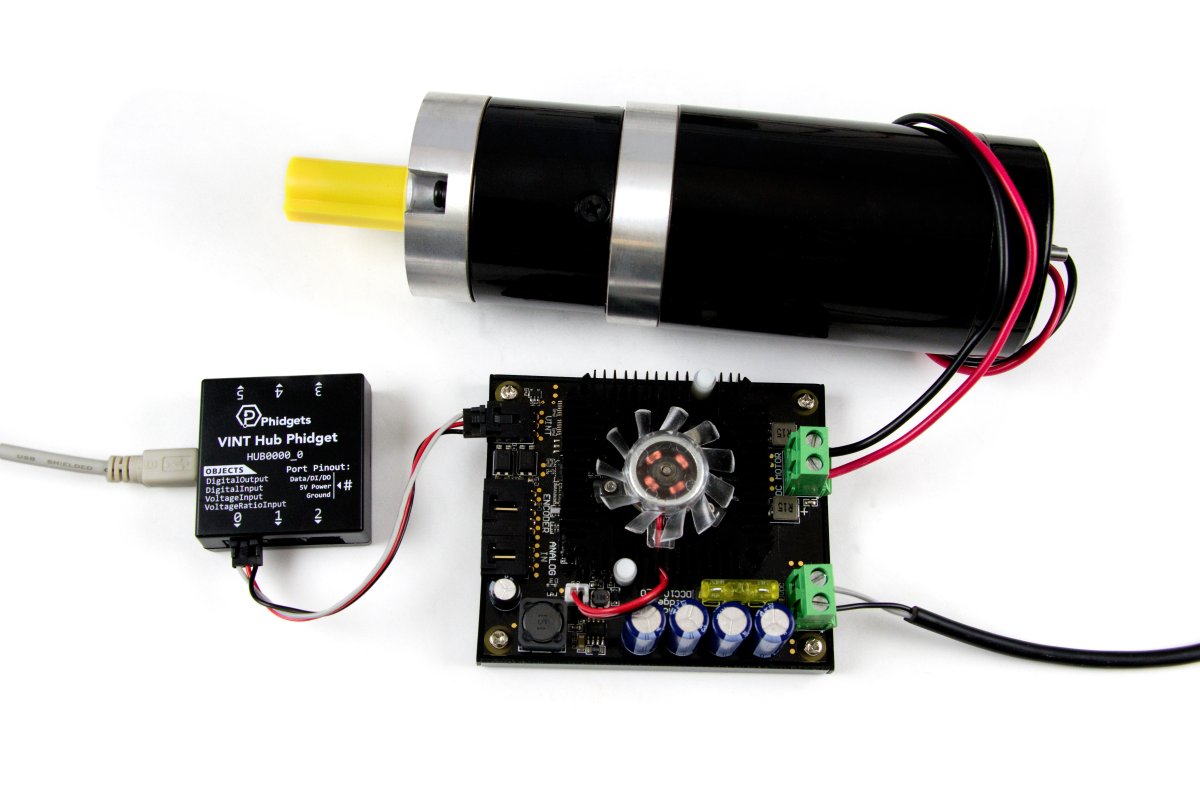
DC motors can be simply connected to a power supply according to their rated voltage in order to make them run, but if you want to have control over direction, velocity, and acceleration in real-time, you'll need to use a motor controller. In order to connect this motor to a controller, you can connect the wires to the motor terminal on the controller. Don't worry about wiring the motor backwards; doing so will only reverse the direction of rotation. This motor requires higher voltage than our small motors, so only the following controllers are suitable:
| Product | Electrical Properties | Controller Properties | Board Properties | ||||
|---|---|---|---|---|---|---|---|
| Part Number | Price | Supply Voltage Max | Continuous Motor Current Max | Number of Motor Ports | Velocity Resolution | Acceleration Resolution | Controlled By |
 30V 50A DC Motor Phidget
|
$150.00 | 30 V DC | 50 A | 1 | 0.00078 Duty Cycle | — | VINT |
 DC Motor Phidget
|
$75.00 | 30 V DC | 25 A | 1 | 0.001 Duty Cycle | 1 Duty Cycle/s | VINT |
 2x DC Motor Phidget
|
$60.00 | 30 V DC | (per motor) 4 A | 2 | 0.001 Duty Cycle | 0.1 Duty Cycle/s | VINT |
 4A DC Motor Phidget
|
$40.00 | 30 V DC | 4 A | 1 | 0.001 Duty Cycle | 0.1 Duty Cycle/s | VINT |
 PhidgetMotorControl 1-Motor
|
$75.00 | 28 V DC | 5 A | 1 | 0.39 Duty Cycle | 24.5 Duty Cycle/s | USB (Mini-USB) |
If you need to connect the main shaft of this motor to another device with a shaft, you can use a shaft coupler:
| Product | Physical Properties | |||||
|---|---|---|---|---|---|---|
| Part Number | Price | Inner Diameter | Material | Coupling Rated Torque | Coupling Rated Speed | Torsional Stiffness |
 Jaw Coupling Half 12mm Series 12
|
$3.60 | 12 mm | Aluminum | 35.7 kg·cm | 12000 RPM | — |
 Jaw Coupling Half 12mm Series 24
|
$6.85 | 12 mm | Aluminum | 611.8 kg·cm | 4000 RPM | — |
If you're using this motor to drive a rotary system that requires a lot of torque, you may be interested in pulleys and sprockets. By using a two pulleys or sprockets of different sizes, you can increase the gear ratio of the motor. Pulleys and sprockets can also be used to transmit the motor's rotation over a long distance. For more guidance on building a transmission system, visit our Rotary Motion Guide. Here is a list of our 12mm bore pulleys and sprockets:
| Product | Physical Properties | ||
|---|---|---|---|
| Part Number | Price | Inner Diameter | Number of Teeth |
 #25 Chain Sprocket with 12mm Bore and 12 Teeth
|
$3.25 | 12 mm | 12 |
 #25 Chain Sprocket with 12mm Bore and 18 Teeth
|
$3.75 | 12 mm | 18 |
 #25 Chain Sprocket with 12mm Bore and 32 Teeth
|
$5.00 | 12 mm | 32 |
 #25 Chain Sprocket with 12mm Bore and 52 Teeth
|
$8.00 | 12 mm | 52 |
 GT2 Pulley with 12mm Bore and 36 Teeth
|
$3.00 | 12 mm | 36 |
 GT2 Pulley with 12mm Bore and 44 Teeth
|
$3.00 | 12 mm | 44 |
 GT2 Pulley with 12mm Bore and 60 Teeth
|
$3.55 | 12 mm | 60 |
 GT2 Pulley with 12mm Bore and 80 Teeth
|
$4.45 | 12 mm | 80 |
 #40 Chain Sprocket with 12mm Bore and 9 Teeth
|
$4.25 | 12 mm | 9 |
 #40 Chain Sprocket with 12mm Bore and 14 Teeth
|
$4.50 | 12 mm | 14 |
 #40 Chain Sprocket with 12mm Bore and 20 Teeth
|
$7.00 | 12 mm | 20 |
 GT5 Pulley with 12mm Bore and 16 Teeth
|
$3.50 | 12 mm | 16 |
 GT5 Pulley with 12mm Bore and 24 Teeth
|
$4.00 | 12 mm | 24 |
 GT5 Pulley with 12mm Bore and 34 Teeth
|
$5.00 | 12 mm | 34 |
 GT5 Pulley with 12mm Bore and 50 Teeth
|
$7.40 | 12 mm | 50 |
 GT5 Pulley with 12mm Bore and 72 Teeth
|
$12.95 | 12 mm | 72 |
Mounting this motor to a flat surface is easy with these metal mounting brackets. The holes on the bracket match those on the front of the gearbox. The following brackets will fit the mounting holes on this motor:
| Product | Physical Properties | ||
|---|---|---|---|
| Part Number | Price | Mounting Plate Size | Material |
 Motor Mounting Bracket (NEMA 23)
|
$4.00 | NEMA - 23 | Mild Steel (Coated) |
Systems with heavy loads or pulley/sprocket assemblies often put a lot of sideways strain on the motor shaft. If you're using this motor to drive such a system, you can use rotary bearings to protect the motor:
| Product | Physical Properties | Mechanical Properties | |||
|---|---|---|---|---|---|
| Part Number | Price | Inner Diameter | Bearing Type | Static Load | Dynamic Load |
 Flanged Rotary Bearing for 12mm Shaft
|
$4.00 | 12 mm | Rotary Shaft (Flanged) | 2.4 kN | 5.1 kN |
 Pillow Block Rotary Bearing for 12mm Shaft
|
$4.00 | 12 mm | Rotary Shaft (Pillow Block) | 2.4 kN | 5.1 kN |
The rear shaft of this motor can be equipped with an encoder for applications where you need to keep track of the exact position, velocity, or acceleration of the motor. The mounting holes on the back of this motor are compatible with the following encoders:
| Product | Motor Properties | Physical Properties | Gearbox Specifications | ||||
|---|---|---|---|---|---|---|---|
| Part Number | Price | Rated Speed | Rated Torque | Shaft Diameter | Weight | Gear Ratio | Gearbox Type |
 12V/0.2Kg-cm/1080RPM 3.7:1 DC Gear Motor
|
$18.00 | 1080 RPM | 240 g·cm | 6 mm | 144 g | 3 12⁄17 : 1 | Planetary |
 12V/0.2Kg-cm/230RPM 10:1 DC Gear Motor
|
$10.00 | 230 RPM | 200 g·cm | 6 mm | 128 g | 10 : 1 | Spur |
 12V/0.9Kg-cm/285RPM 14:1 DC Gear Motor
|
$18.00 | 285 RPM | 900 g·cm | 6 mm | 170 g | 13 212⁄289 : 1 | Planetary |
 12V/0.3Kg-cm/127RPM 18:1 DC Gear Motor
|
$10.00 | 127 RPM | 310 g·cm | 6 mm | 133 g | 18 : 1 | Spur |
 12V/0.8Kg-cm/46RPM 50:1 DC Gear Motor
|
$11.00 | 46 RPM | 820 g·cm | 6 mm | 137 g | 50 : 1 | Spur |
 12V/1.6Kg-cm/23RPM 100:1 DC Gear Motor
|
$11.00 | 23 RPM | 1.6 kg·cm | 6 mm | 136 g | 100 : 1 | Spur |
 12V/0.5Kg-cm/670RPM 3.7:1 DC Gear Motor
|
$38.00 | 670 RPM | 540 g·cm | 8 mm | 416 g | 3 12⁄17 : 1 | Planetary |
 12V/1.9Kg-cm/175RPM 14:1 DC Gear Motor
|
$42.00 | 175 RPM | 1.9 kg·cm | 8 mm | 464 g | 13 212⁄289 : 1 | Planetary |
 12V/6.6Kg-cm/49RPM 51:1 DC Gear Motor
|
$43.00 | 49 RPM | 6.6 kg·cm | 8 mm | 526 g | 50 801⁄895 : 1 | Planetary |
 12V/6.6Kg-cm/49RPM 51:1 DC Gear Motor
|
$33.00 | 49 RPM | 6.6 kg·cm | 8 mm | 526 g | 50 801⁄895 : 1 | Planetary |
 12V/17.3Kg-cm/18RPM 139:1 DC Gear Motor
|
$43.00 | 18 RPM | 17.3 kg·cm | 8 mm | 526 g | * 139 184⁄1221 : 1 | Planetary |
 24V/2.5Kg-cm/3280RPM DC Motor
|
$40.00 | 3280 RPM | 3.3 kg·cm | 8 mm | 1.4 kg | — | — |
 24V/7Kg-cm/3000RPM DC Motor
|
$50.00 | 2800 RPM | 7.1 kg·cm | 10 mm | 2.7 kg | — | — |
 24V/9.6Kg-cm/3200RPM DC Motor
|
$60.00 | 2900 RPM | 9.7 kg·cm | 10 mm | 3.3 kg | — | — |
 24V/5.1Kg-cm/588RPM 4.25:1 DC Gear Motor
|
$69.00 | 588 RPM | 4.4 kg·cm | 12 mm | 1.3 kg | 4 1⁄4 : 1 | Planetary |
 24V/12.2Kg-cm/772RPM/4.25:1 DC Gear Motor
|
$80.00 | 772 RPM | 12.2 kg·cm | 12 mm | 1.9 kg | 4 1⁄4 : 1 | Planetary |
 24V/14.2Kg-cm/192RPM 13:1 DC Gear Motor
|
$66.00 | 192 RPM | 13.3 kg·cm | 12 mm | 1.5 kg | 12 24⁄25 : 1 | Planetary |
 24V/45Kg-cm/182RPM/18:1 DC Gear Motor
|
$82.00 | 182 RPM | 47 kg·cm | 12 mm | 2.1 kg | 18 : 1 | Planetary |
 24V/50.9Kg-cm/53RPM 47:1 DC Gear Motor
|
$72.00 | 53 RPM | 43.8 kg·cm | 12 mm | 1.7 kg | 46 82⁄125 : 1 | Planetary |
 24V/153Kg-cm/50RPM/65:1 DC Gear Motor
|
$84.00 | 50 RPM | 153 kg·cm | 12 mm | 2.2 kg | 65 : 1 | Planetary |
 24V/82.6Kg-cm/33RPM 76:1 DC Gear Motor
|
$72.00 | 33 RPM | 71.4 kg·cm | 12 mm | 1.7 kg | 76 49⁄64 : 1 | Planetary |
 24V/173.3Kg-cm/15RPM 168:1 DC Gear Motor
|
$76.00 | 15 RPM | 136.6 kg·cm | 12 mm | 2 kg | 167 601⁄625 : 1 | Planetary |

