DST1200 - Product Video
Product video for the Sonar Phidget (DST1200_0)







Out of Stock
Estimated Restock Date:
Fri Aug 08 2025
| Qty | Price |
|---|---|
| 10 | $23.75 |
| 25 | $21.25 |
| 50 | $18.75 |
| 100 | $17.50 |
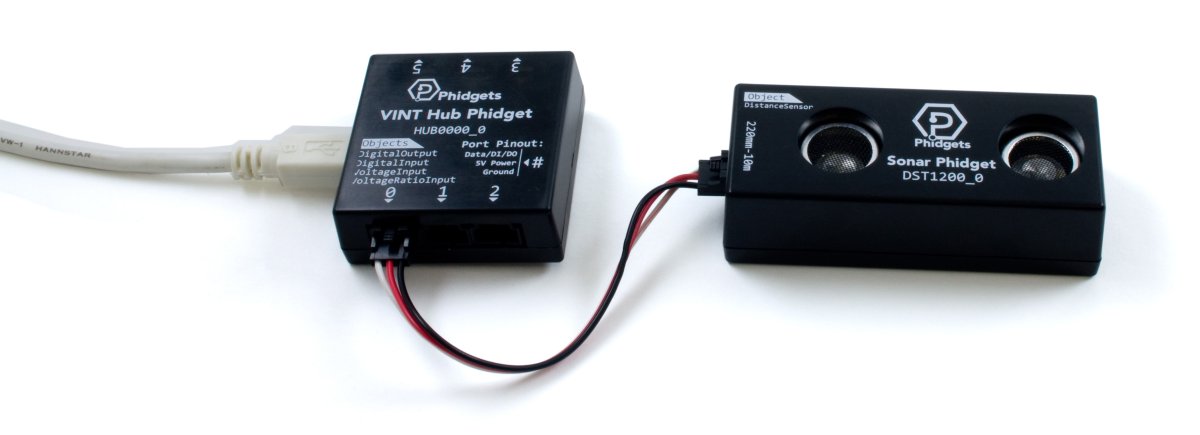
The DST1200 accurately measures distances between 40mm and ~10m. Use this Phidget for motion sensing, object detection, or spatial awareness. This Phidget connects to your computer through a VINT Hub.
This Phidget is a smart device that must be controlled by a VINT Hub. For more information about VINT, have a look at the VINT Overview page. You can use a Phidget Cable to simply and easily connect the two devices. Here's a list of all of the different VINT Hubs currently available:
| Product | Board Properties | |||
|---|---|---|---|---|
| Part Number | Price | Number of VINT Ports | VINT Communication Speed Max | Controlled By |
 VINT Hub Phidget
|
$40.00 | 6 | 1 Mbit/s | USB (Mini-USB) |
 1-Port VINT Hub Phidget
|
$26.00 | 1 | 1 Mbit/s | USB (USB-A) |
 VINT Hub Phidget
|
$35.00 | 6 | 1 Mbit/s | USB (Mini-USB) |
 Wireless VINT Hub
|
$60.00 | 6 | 100 kbit/s | Local Network (Ethernet or Wi-Fi) |
 PhidgetSBC4
|
$120.00 | 6 | 100 kbit/s | — |
Use a Phidget cable to connect this device to the hub. You can solder multiple cables together in order to make even longer Phidget cables, but you should be aware of the effects of having long wires in your system.
| Product | Physical Properties | |
|---|---|---|
| Part Number | Price | Cable Length |
 Phidget Cable 10cm
|
$1.50 | 100 mm |
 Phidget Cable 30cm
|
$1.75 | 300 mm |
 Phidget Cable 60cm
|
$2.00 | 600 mm |
 Phidget Cable 60cm
|
$2.00 | 600 mm |
 Phidget Cable 90cm
|
$2.00 | 900 mm |
 Phidget Cable 120cm
|
$2.25 | 1.2 m |
 Phidget Cable 150cm
|
$2.50 | 1.5 m |
 Phidget Cable 180cm
|
$2.75 | 1.8 m |
 Phidget Cable 350cm
|
$3.00 | 3.5 m |
 Phidget Cable Kit
|
$10.00 | 80 mm |
 Phidget Cable Extension Wire 22AWG
|
$0.75/Meter | — |
The DST1000 uses reflected ultrasonic waves to measure distance. Use this Phidget for motion sensing, object detection, or spatial awareness. The sensor will measure the distance of as many as 8 objects at the same time, from 40mm to ~10m in optimal conditions with an accuracy of about 10mm.
You can use your Control Panel to explore your Phidget's channels.
1. Open your Control Panel, and you will find the following channel:
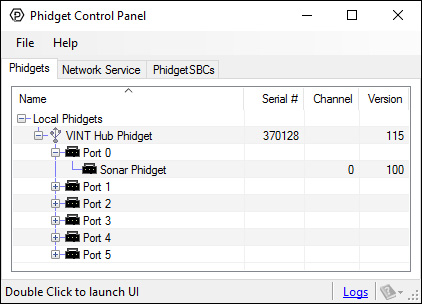
2. Double click on the channel to open the example program. This channel belongs to the DistanceSensor channel class:
In your Control Panel, double click on "Sonar Phidget":
Before you open a Phidget channel in your program, you can set these properties to specify which channel to open. You can find this information through the Control Panel.
1. Open the Control Panel and double-click on the red map pin icon:

2. The Addressing Information window will open. Here you will find all the information you need to address your Phidget in your program.

See the Phidget22 API for your language to determine exact syntax for each property.
Note: Graphing and logging is currently only supported in the Windows version of the Phidget Control Panel.
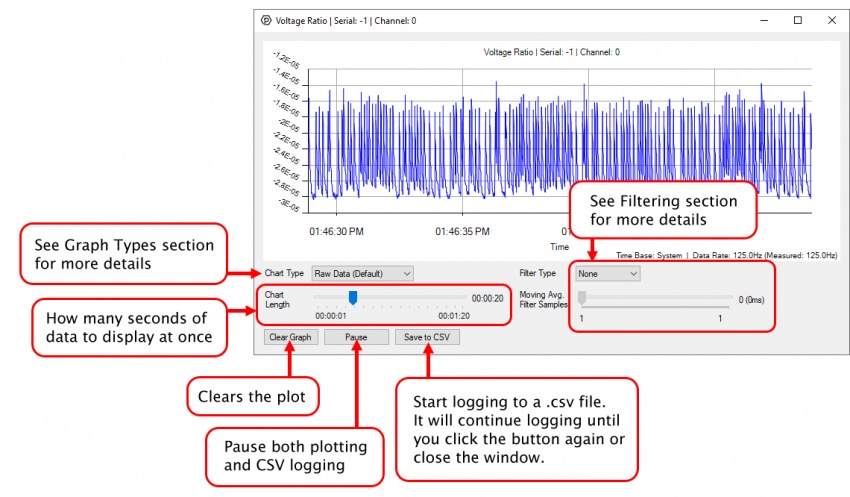
In the Phidget Control Panel, open the channel for your device and click on the ![]() icon next to the data type that you want to plot. This will open up a new window:
icon next to the data type that you want to plot. This will open up a new window:
If you need more complex functionality such as logging multiple sensors to the same sheet or performing calculations on the data, you'll need to write your own program. Generally this will involve addressing the correct channel, opening it, and then creating an Event Handler and adding graphing/logging code to it.
The quickest way to get started is to download some sample code for your desired programming language and then search google for logging or plotting in that language (e.g. "how to log to csv in python") and add the code to the existing change handler.
You can perform filtering on the raw data in order to reduce noise in your graph. For more information, see the Control Panel Graphing page.
You can perform a transform on the incoming data to get different graph types that may provide insights into your sensor data. For more information on how to use these graph types, see the Control Panel Graphing page.
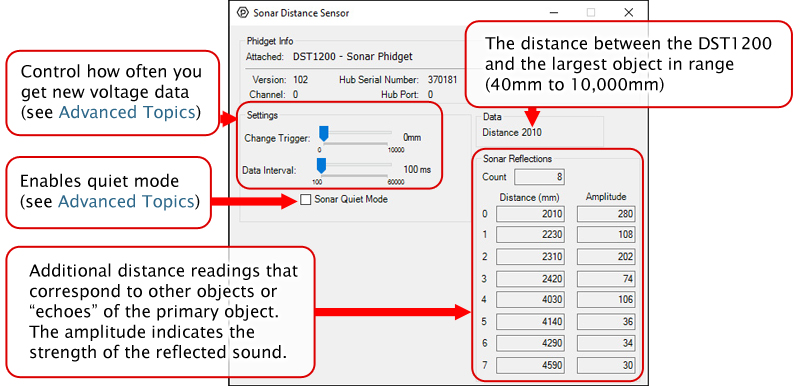
The Change Trigger is the minimum change in the sensor data needed to trigger a new data event.
The Data Interval is the time (in ms) between data events sent out from your Phidget.
The Data Rate is the reciprocal of Data Interval (measured in Hz), and setting it will set the reciprocal value for Data Interval and vice-versa.
You can modify one or both of these values to achieve different data outputs. You can learn more about these properties here.
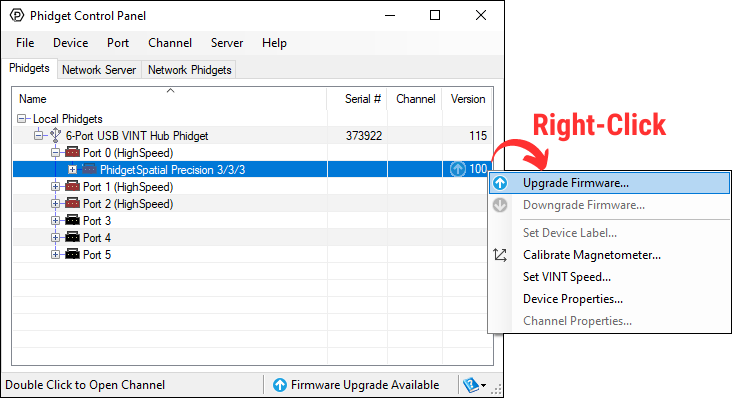
Firmware Upgrade
MacOS users can upgrade device firmware by double-clicking the device row in the Phidget Control Panel.
Linux users can upgrade via the phidget22admin tool (see included readme for instructions).
Windows users can upgrade the firmware for this device using the Phidget Control Panel as shown below.
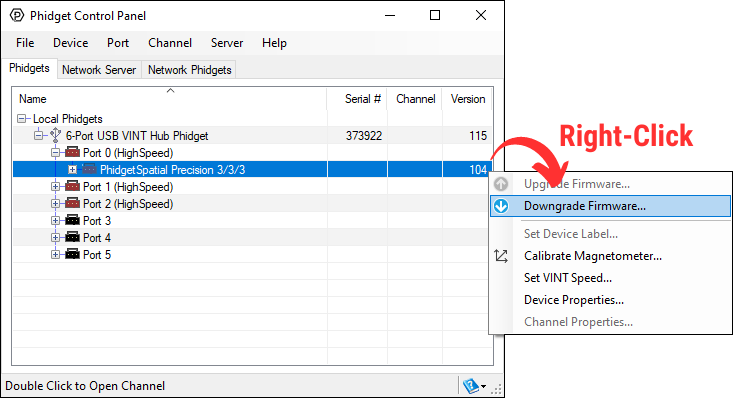
Firmware Downgrade
Firmware upgrades include important bug fixes and performance improvements, but there are some situations where you may want to revert to an old version of the firmware (for instance, when an application you're using is compiled using an older version of phidget22 that doesn't recognize the new firmware).
MacOS and Linux users can downgrade using the phidget22admin tool in the terminal (see included readme for instructions).
Windows users can downgrade directly from the Phidget Control Panel if they have driver version 1.9.20220112 or newer:
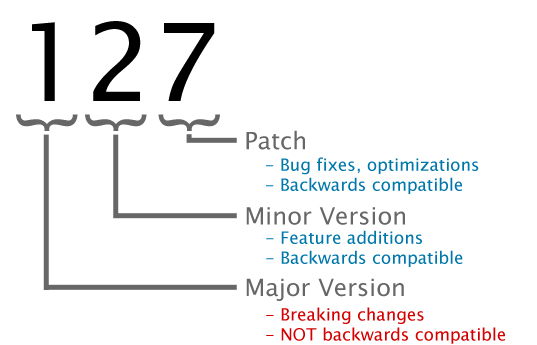
Firmware Version Numbering Schema
Phidgets device firmware is represented by a 3-digit number. For firmware patch notes, see the device history section on the Specifications tab on your device's product page.
If your device has a ![]() icon printed on the enclosure, it means that it has an improved filter on its VINT connection that upgrades performance when plugged into a port on a VINT Hub that also has the
icon printed on the enclosure, it means that it has an improved filter on its VINT connection that upgrades performance when plugged into a port on a VINT Hub that also has the ![]() icon:
icon:
For details on how the maximum cable length is impacted, see the specifications tab on the product page for this device.
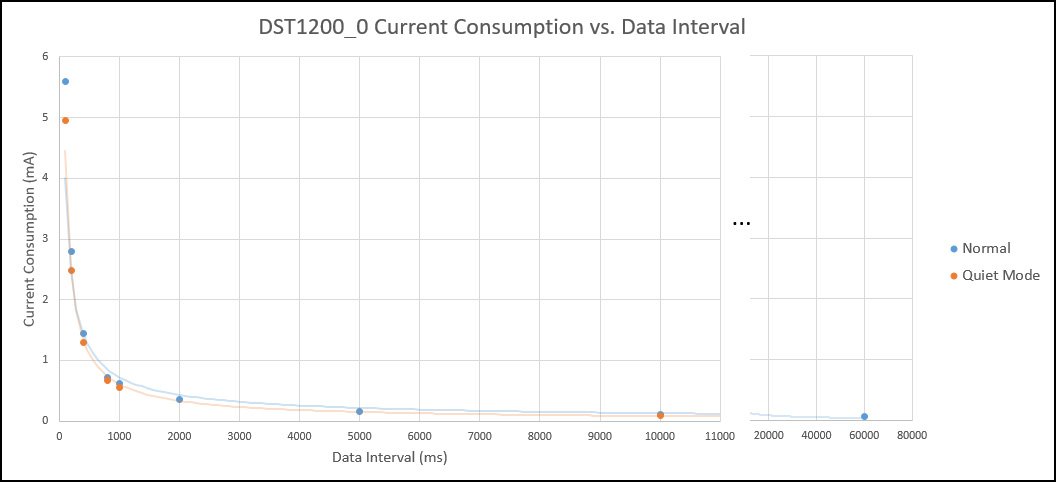
The DST1200 has a Quiet Mode which reduces the volume of the sound pulses used by the sonar sensors. While the sound that this Phidget makes is audible in either mode, it is much less noticeable with quiet mode enabled. By enabling quiet mode, you will decrease the maximum sensing range and the number of reflections detected. Quiet mode also consumes less power (see product page specifications for details).
When you receive data from the DST1200, you will end up with an array of sonar reflections that each have a distance and an amplitude. The distance, of course, refers to how far away the object is. The amplitude gives you a general idea of the size of the object. The amplitude value can range from 3 to approximately 900, with 3 being a very small reflection and 900 being a very large reflection. In some applications, you will want to ignore reflections with an amplitude you deem is too small.
The DST1200 will fire saturation error events when the nearest reflection is closer than 40mm from the sensor. At this range it is too close for the sensor to accurately determine the range of the object.
| Sensor Properties | |
|---|---|
| Sensor Type | Distance (Sonar) |
| Controlled By | VINT |
| Measurement Distance Min | 40 mm |
| Measurement Distance Max | 10 m |
| Measurement Distance Resolution | 10 mm |
| Sampling Interval Min | 100 ms/sample |
| Sampling Interval Max | 60 s/sample |
| VINT Communication Speed Max | 100 kbit/s |
| Electrical Properties | |
| Current Consumption Max | * 5.6 mA |
| Current Consumption Min | (unconfigured) 47 μA |
| Physical Properties | |
| Operating Temperature Min | -40 °C |
| Operating Temperature Max | 85 °C |
| Customs Information | |
| Canadian HS Export Code | 8471.80.00 |
| American HTS Import Code | 8471.80.40.00 |
| Country of Origin | CN (China) |
* - Current consumption varies depending on selected data interval. See the graph below for details.
The enclosure for the DST1200 may state the range as being 220mm to 10m, but it is actually 40mm to 10m, as listed in the specification table.
| Date | Board Revision | Device Version | Comment |
|---|---|---|---|
| June 2017 | 0 | 104 | Product Release |
| January 2018 | 0 | 105 | Fixed inability to set change trigger to max |
| April 2018 | 0 | 106 | First valid measurement after saturation now always triggers an event |
| Channel Name | API | Channel |
|---|---|---|
| Sonar Distance Sensor | DistanceSensor | 0 |
| Product | Sensor Properties | ||||
|---|---|---|---|---|---|
| Part Number | Price | Sensor Type | Controlled By | Measurement Distance Min | Measurement Distance Max |
 Distance Phidget 1300mm
|
$35.00 | Distance (Infrared) | VINT | 20 mm | * 1.3 m |
 Distance Phidget 650mm
|
$30.00 | Distance (Infrared) | VINT | 20 mm | * 650 mm |
 Sonar Phidget
|
$25.00 | Distance (Sonar) | VINT | 40 mm | 10 m |
 IR Reflective Sensor 1-4mm
|
$5.00 | Distance (Infrared) | VoltageRatio Input | 1.5 mm | 4 mm |
 Sharp Distance Sensor (10-80cm)
|
$12.00 | Distance (Infrared) | Sharp Adapter | 100 mm | 800 mm |
 Sharp Distance Sensor (20-150cm)
|
$16.00 | Distance (Infrared) | Sharp Adapter | 200 mm | 1.5 m |
 Sharp Distance Sensor (4-30cm)
|
$14.00 | Distance (Infrared) | Sharp Adapter | 40 mm | 300 mm |
 Distance Phidget 170mm
|
$30.00 | Distance (Infrared) | VINT | 4 mm | * 170 mm |