Products for USB Sensing and Control



The nearest replacement for this motor is the 3330_0, the same size and shape with a 0.9° step angle instead of 1.8°.
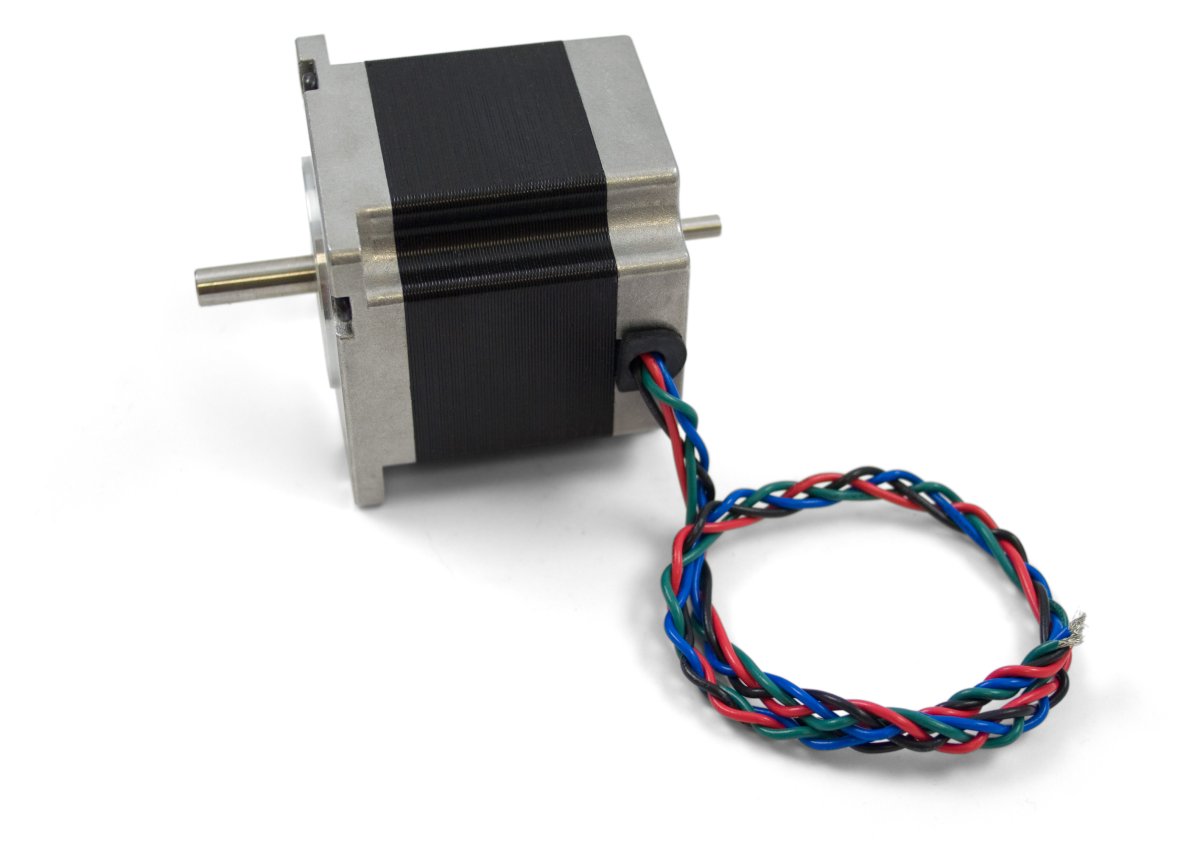
This NEMA-23 motor generates 12.6 kg-cm of holding torque at 2.8 Amps. It comes with the rear shaft exposed, so you can mount an encoder or shaft coupler. See the Connection & Compatibility tab for a complete list of attachments.

|
Connecting the motor directly to a power supply will destroy the motor and void the warranty. If you want to check your motor make sure it is connected to a constant current / chopper drive controller. |
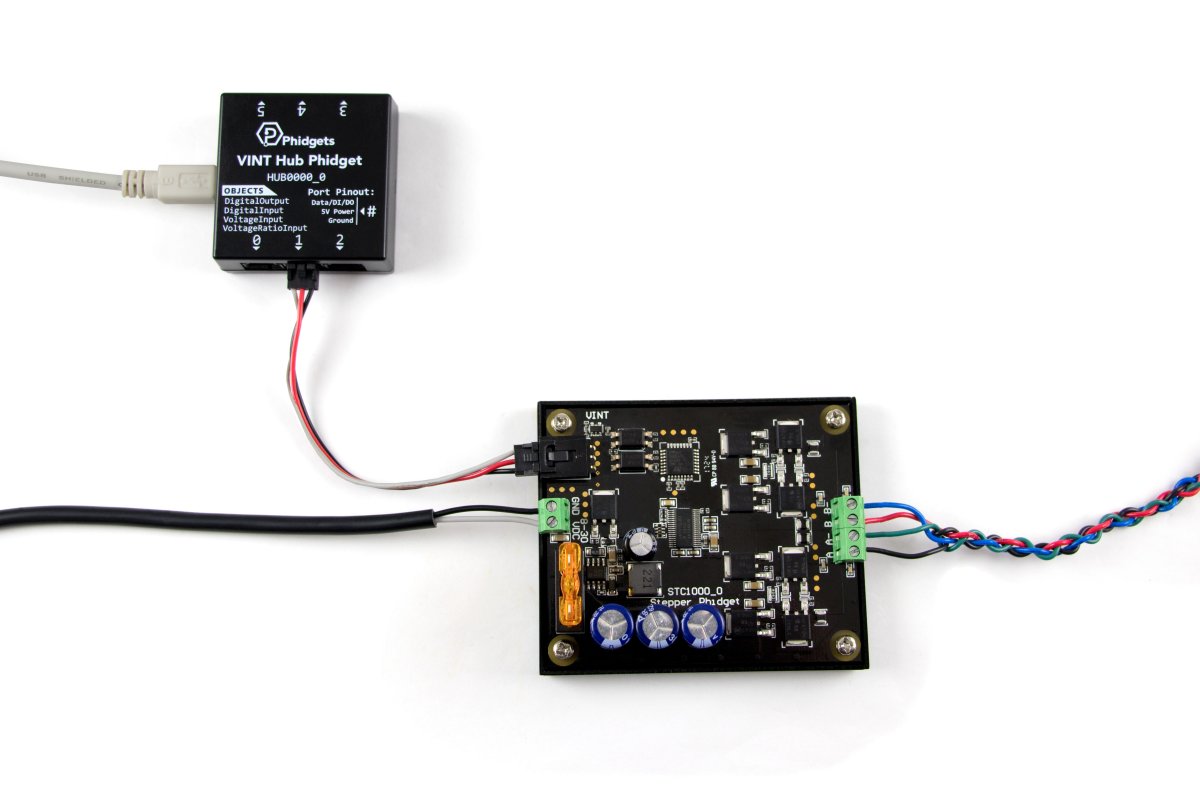
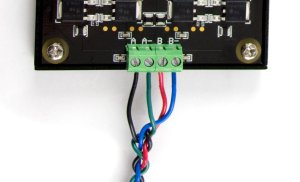
This motor must be controlled by a stepper motor controller. This diagram shows how to connect the motor wires to the controller to produce a clockwise rotation in the stepper motor when increasing position. To wire for counter-clockwise rotation when increasing position, reverse the red and blue wires.
Note: Make sure to unplug the power cord from the motor controller before switching wires around.
|
 |
 |
The following stepper controllers can be used to drive this motor:
| Product | Controller Properties | Electrical Properties | |||
|---|---|---|---|---|---|
| Part Number | Price | Motor Position Resolution | Stepper Velocity Resolution | Stepper Velocity Max | Available Current per Coil Max |
 4A Stepper Phidget
|
$50.00 | 1⁄16 Step (40-Bit Signed) | 1 1⁄16 steps/sec | 115000 1⁄16 steps/sec | 4 A |
 8A Stepper Phidget
|
$80.00 | 1⁄16 Step (40-Bit Signed) | 1 1⁄16 steps/sec | 115000 1⁄16 steps/sec | 8 A |
 PhidgetStepper Bipolar HC
|
$90.00 | 1⁄16 Step (40-Bit Signed) | 1 1⁄16 steps/sec | 250000 1⁄16 steps/sec | 4 A |
The rear shaft of this motor can be equipped with an encoder for applications where you need to keep track of the exact position, velocity, or acceleration of the motor. The mounting holes on the back of this motor are compatible with the following encoders:
| Product | Encoder Properties | |||
|---|---|---|---|---|
| Part Number | Price | Output Circuit Type | Encoder Resolution | Encoder Speed Max |
 Rotary Encoder - For 4mm Motor Shaft 300 CPR
|
$25.00 | Push-Pull | 300 CPR | 6000 RPM |
 Rotary Encoder - For 4mm Motor Shaft 40 CPR
|
$10.00 | Push-Pull | 40 CPR | 6000 RPM |
If you need to connect the main shaft of this motor to the shaft of another device, you can use a shaft coupler:
| Product | Physical Properties | |||||
|---|---|---|---|---|---|---|
| Part Number | Price | Inner Diameter | Material | Coupling Rated Torque | Coupling Rated Speed | Torsional Stiffness |
 Jaw Coupling Half 0.25" Series 12
|
$2.80 | 1⁄4″ | Aluminum | 35.7 kg·cm | 12000 RPM | — |
If you're using this motor to drive a rotary system that requires a lot of torque, you may be interested in pulleys and sprockets. By using a two pulleys or sprockets of different sizes, you can increase the gear ratio of the motor. Pulleys and sprockets can also be used to transmit the motor's rotation over a long distance. For more guidance on building a transmission system, visit our Rotary Motion Guide. Here is a list of our 1/4" bore pulleys and sprockets:
| Product | Physical Properties | ||
|---|---|---|---|
| Part Number | Price | Inner Diameter | Number of Teeth |
 GT2 Pulley with 0.25" Bore and 22 Teeth
|
$3.00 | 1⁄4″ | 22 |
 GT5 Pulley with 0.25" Bore and 12 Teeth
|
$2.75 | 1⁄4″ | 12 |
Mounting this motor to a flat surface is easy with these metal mounting brackets. The holes on the bracket match those on the back of the motor, as well as the ones on the front of the gearbox. The following brackets will fit the mounting holes on this motor:
| Product | Physical Properties | ||
|---|---|---|---|
| Part Number | Price | Mounting Plate Size | Material |
 Motor Mounting Bracket (NEMA 23)
|
$4.00 | NEMA - 23 | Mild Steel (Coated) |
| Motor Properties | |
|---|---|
| Motor Type | Bipolar Stepper |
| Manufacturer Part Number | 57STH56-2804B |
| Step Angle | 1.8° |
| Step Accuracy | ± 5 % |
| Holding Torque | 12.6 kg·cm |
| Rated Torque | 11 kg·cm |
| Maximum Motor Speed | 2150 RPM |
| Electrical Properties | |
| Recommended Voltage | 12 V DC |
| Rated Current | 2.8 A |
| Coil Resistance | 900 mΩ |
| Phase Inductance | 2.5 mH |
| Physical Properties | |
| Shaft Diameter | 1⁄4″ |
| Rear Shaft Diameter | 3.9 mm |
| Mounting Plate Size | NEMA - 23 |
| Weight | 686 g |
| Number of Leads | 4 |
| Wire Length | 300 mm |
| Customs Information | |
| Canadian HS Export Code | 8501.10.00 |
| American HTS Import Code | 8501.10.40.40 |
| Country of Origin | CN (China) |
| Product | Motor Properties | Electrical Properties | Physical Properties | Gearbox Properties | ||||
|---|---|---|---|---|---|---|---|---|
| Part Number | Price | Step Angle | Rated Torque | Maximum Motor Speed | Recommended Voltage | Shaft Diameter | Weight | Gear Ratio |
 NEMA11 - 1.8 Degree - 0.67A Stepper - Gearless
|
$16.00 | 1.8° | 520 g·cm | 1300 RPM | 24 V DC | 5 mm | 111.4 g | — |
 NEMA11 - 1.8 Degree - 1.5A Stepper - 27:1 Gearbox
|
$38.00 | 1.8° | 14 kg·cm | 50 RPM | 24 V DC | 6 mm | 217.5 g | 26 103⁄121 : 1 |
 NEMA11 - 1.8 Degree - 1.5A Stepper - 100:1 Gearbox
|
$50.00 | 1.8° | 32 kg·cm | 13 RPM | 24 V DC | 6 mm | 243.6 g | 99 1044⁄2057 : 1 |
 NEMA14 - 1.8 Degree - 1A Stepper - Gearless
|
$16.00 | 1.8° | 1.2 kg·cm | 1000 RPM | 24 V DC | 5 mm | 200 g | — |
 NEMA17 - 0.9 Degree - 1.68A Stepper - Gearless
|
$20.00 | 0.9° | 3.3 kg·cm | 400 RPM | 24 V DC | 5 mm | 288 g | — |
 NEMA17 - 1.8 Degree - 1.68A Stepper - Gearless
|
$16.00 | 1.8° | 3.3 kg·cm | 1000 RPM | 24 V DC | 5 mm | 289 g | — |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 5.18:1 Gearbox
|
$40.00 | 1.8° | 18 kg·cm | 200 RPM | 24 V DC | 8 mm | 457 g | 5 2⁄11 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 14:1 Gearbox
|
$42.00 | 1.8° | 30 kg·cm | 70 RPM | 24 V DC | 8 mm | 502 g | 13 212⁄289 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 27:1 Gearbox
|
$44.00 | 1.8° | 30 kg·cm | 40 RPM | 24 V DC | 8 mm | 503 g | 26 103⁄121 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 51:1 Gearbox
|
$46.00 | 1.8° | 48 kg·cm | 20 RPM | 24 V DC | 8 mm | 564 g | 50 4397⁄4913 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 100:1 Gearbox
|
$48.00 | 1.8° | 48 kg·cm | 10 RPM | 24 V DC | 8 mm | 564 g | 99 1044⁄2057 : 1 |
 NEMA23 - 0.9 Degree - 2.8A Stepper - Gearless
|
$28.00 | 0.9° | 11.2 kg·cm | 500 RPM | 24 V DC | 1⁄4″ | 695 g | — |
 NEMA23 - 1.8 Degree - 2.8A Stepper - 4.25:1 Gearbox
|
$70.00 | 1.8° | 46.6 kg·cm | 165 RPM | 24 V DC | 12 mm | 1.2 kg | 4 1⁄4 : 1 |
 NEMA23 - 1.8 Degree - 2.8A Stepper - 15:1 Gearbox
|
$72.00 | 1.8° | 150 kg·cm | 50 RPM | 24 V DC | 12 mm | 1.3 kg | 15 3⁄10 : 1 |
 NEMA23 - 1.8 Degree - 2.8A Stepper - 77:1 Gearbox
|
$74.00 | 1.8° | 240 kg·cm | 10 RPM | 24 V DC | 12 mm | 1.5 kg | 76 49⁄64 : 1 |
 NEMA34 - 1.8 Degree - 4A Stepper - Gearless
|
$60.00 | 1.8° | 30 kg·cm | 200 RPM | 30 V DC | 12 mm | 1.8 kg | — |