RCC1000 - Product Video
Product video for the 16x RC Servo Phidget (RCC1000_0)



Quantity Available: 66
| Qty | Price |
|---|---|
| 10 | $57.00 |
| 25 | $51.00 |
| 50 | $45.00 |
| 100 | $42.00 |
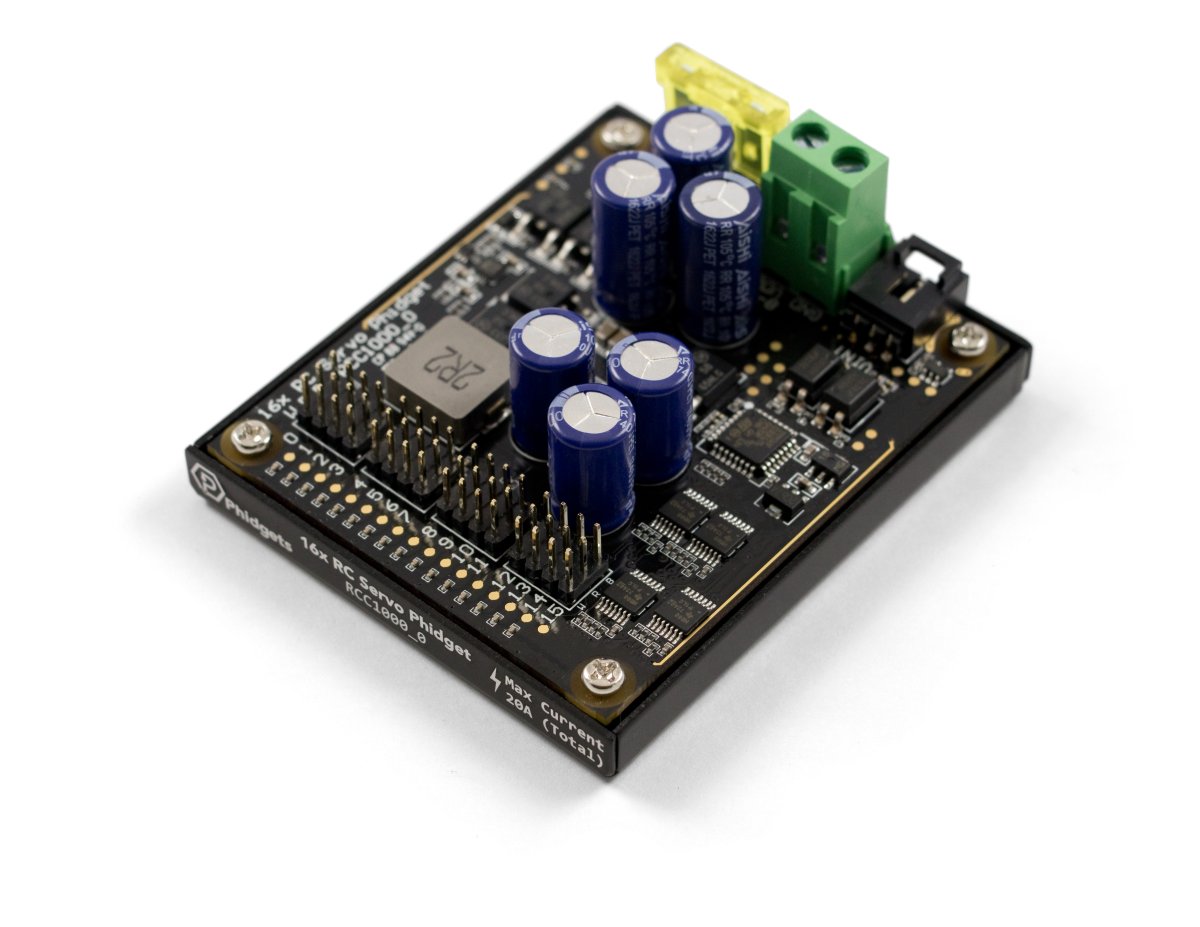
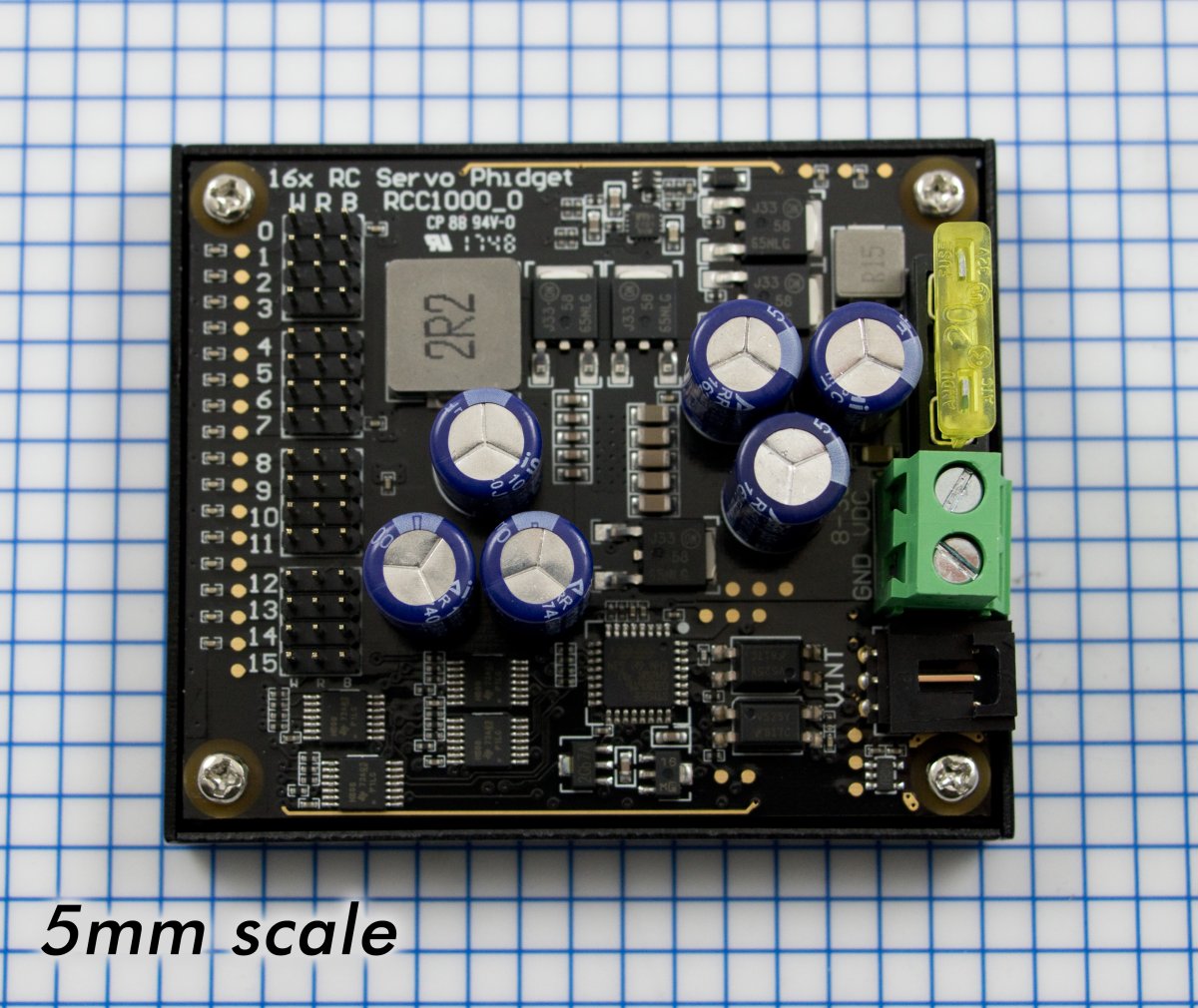
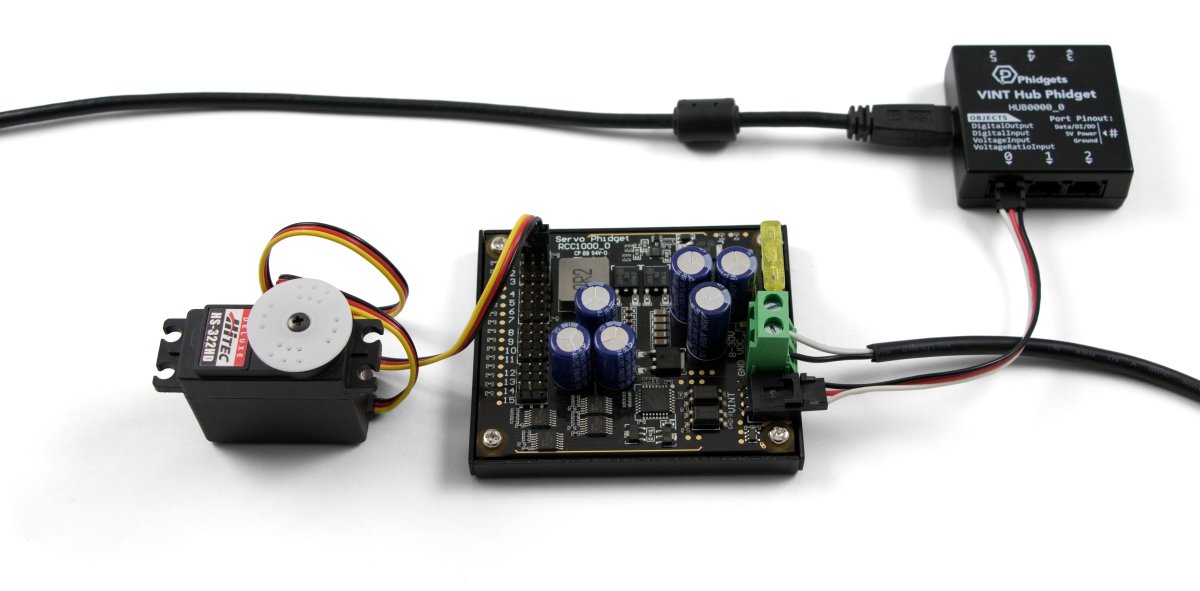
The RC Servo Phidget can control up to 16 RC servo motors. The servo voltage can be configured in software and up to 20A of total power can be provided to the servos. This Phidget connects to your computer through a VINT Hub.
This Phidget is a smart device that must be controlled by a VINT Hub. For more information about VINT, have a look at the VINT Overview page. You can use a Phidget Cable to simply and easily connect the two devices. Here's a list of all of the different VINT Hubs currently available:
| Product | Board Properties | |||
|---|---|---|---|---|
| Part Number | Price | Number of VINT Ports | VINT Communication Speed Max | Controlled By |
 VINT Hub Phidget
|
$40.00 | 6 | 1 Mbit/s | USB (Mini-USB) |
 1-Port VINT Hub Phidget
|
$26.00 | 1 | 1 Mbit/s | USB (USB-A) |
 VINT Hub Phidget
|
$35.00 | 6 | 1 Mbit/s | USB (Mini-USB) |
 Wireless VINT Hub
|
$60.00 | 6 | 100 kbit/s | Local Network (Ethernet or Wi-Fi) |
 PhidgetSBC4
|
$120.00 | 6 | 100 kbit/s | — |
Use a Phidget cable to connect this device to the hub. You can solder multiple cables together in order to make even longer Phidget cables, but you should be aware of the effects of having long wires in your system.
| Product | Physical Properties | |
|---|---|---|
| Part Number | Price | Cable Length |
 Phidget Cable 10cm
|
$1.50 | 100 mm |
 Phidget Cable 30cm
|
$1.75 | 300 mm |
 Phidget Cable 60cm
|
$2.00 | 600 mm |
 Phidget Cable 60cm
|
$2.00 | 600 mm |
 Phidget Cable 90cm
|
$2.00 | 900 mm |
 Phidget Cable 120cm
|
$2.25 | 1.2 m |
 Phidget Cable 150cm
|
$2.50 | 1.5 m |
 Phidget Cable 180cm
|
$2.75 | 1.8 m |
 Phidget Cable 350cm
|
$3.00 | 3.5 m |
 Phidget Cable Kit
|
$10.00 | 80 mm |
 Phidget Cable Extension Wire 22AWG
|
$0.75/Meter | — |
The 16x RC Servo Phidget can drive up to 16 servo motors, up to a total maximum of 20 amps of current. Each of the servo motors in the list below is compatible with this Phidget and plugs directly to the board with no extra cables or soldering required. Servos come in two major varieties: limited rotation and continuous rotation. With limited rotation servos, the motor has a limited range of motion, but can be precisely controlled within that range. A continuous rotation servo can rotate continuously, but you won't be able to tell the servo to move to a specific location in degrees; instead you'll specify a direction and speed and for it to rotate at.
| Product | Motor Properties | ||||
|---|---|---|---|---|---|
| Part Number | Price | Motor Type | Range of Rotation | Rated Torque | Rated Speed |
 Hitec Continuous Rotation Servo
|
$18.75 | Continuous Rotation Servo | — | 2.8 kg·cm | 44 RPM |
 Hitec Mega Sail Servo
|
$52.00 | Limited Rotation Servo | 180° | 19.8 kg·cm | 125°/s |
 Hitec Super Torque Servo
|
$40.50 | Limited Rotation Servo | 180° | 7.7 kg·cm | 300°/s |
 Hitec Winch Servo
|
$57.75 | Limited Rotation Servo | Approx. 2700° | 11 kg·cm | 225°/s |
 SpringRC Standard Servo
|
$8.00 | Limited Rotation Servo | 180° | 3.5 kg·cm | 400°/s |
 SpringRC Small Servo
|
$10.00 | Limited Rotation Servo | 180° | 2.4 kg·cm | 375°/s |
 SpringRC High Torque Continuous Rotation Servo
|
$18.00 | Continuous Rotation Servo | — | 12.2 kg·cm | 50 RPM |
This Phidget requires a power supply between 8 and 30V DC. We recommend that you use a 12V 5A DC power supply in most cases, but if you plan on using servos that add up to more than 5 Amps, you will want to get a power supply with a higher current rating. Select a power supply from the list below that matches your region's wall socket type.
| Product | Electrical Properties | Physical Properties | ||
|---|---|---|---|---|
| Part Number | Price | Power Supply Current | Output Voltage | Wall Plug Style |
 Power Supply 24VDC 14.6A
|
$40.00 | 14.6 A | 24 V | — |
 Power Supply 24VDC 25A Current Limiting
|
$120.00 | 25 A | 24 V | — |
 Power Supply 12VDC 0.5A - EU
|
$1.50 | 500 mA | 12 V | European |
 Power Supply 12VDC 0.5A - US
|
$1.50 | 500 mA | 12 V | North American |
 Power Supply 12VDC 2.0A - AU
|
$10.00 | 2 A | 12 V | Australian |
 Power Supply 12VDC 2.0A - EU
|
$10.00 | 2 A | 12 V | European |
 Power Supply 12VDC 2.0A - UK
|
$10.00 | 2 A | 12 V | British |
 Power Supply 12VDC 5A
|
$20.00 | 5 A | 12 V | — |
 Power Supply 24VDC 1.0A - US
|
$10.00 | 1 A | 24 V | North American |
 Power Supply 24VDC 2.5A
|
$20.00 | 2.5 A | 24 V | — |
 Power Supply 24VDC 5A
|
$40.00 | 5 A | 24 V | — |
 Power Supply-12VDC 2.0A - US
|
$10.00 | 2 A | 12 V | North American |
The RC Servo Phidget can control the position, velocity, and acceleration of up to 16 RC servo motors. It is powered externally by an 8-30V supply, providing a total of up to 20A of regulated power to its servos. You can control the regulator and choose a global voltage of 5.0V, 6.0V, or 7.4V. A servo will have more torque when running at a higher voltage but will have a shorter overall lifespan.

You can use your Control Panel to explore your Phidget's channels.
1. Open your Control Panel, and you will find the following channels:
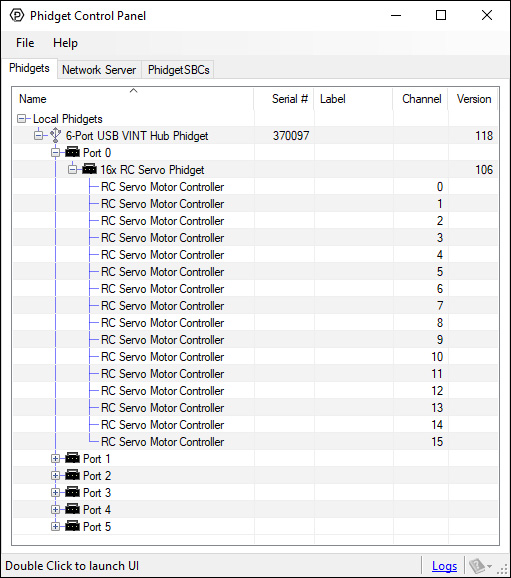
2. Double click on a channel to open an example program. Each channel belongs to the RCServo channel class:
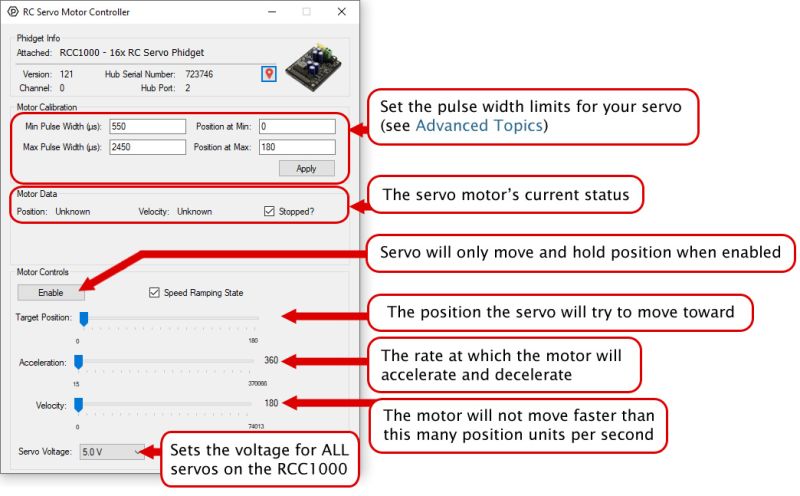
In your Control Panel, double click on "RC Servo Motor Controller":
Before you open a Phidget channel in your program, you can set these properties to specify which channel to open. You can find this information through the Control Panel.
1. Open the Control Panel and double-click on the red map pin icon:

2. The Addressing Information window will open. Here you will find all the information you need to address your Phidget in your program.

See the Phidget22 API for your language to determine exact syntax for each property.
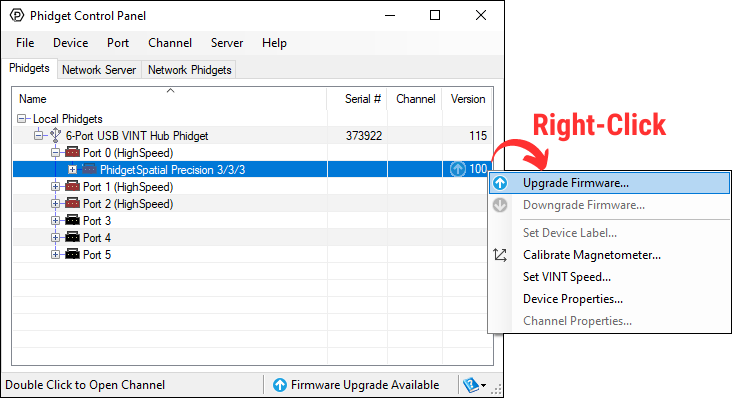
Firmware Upgrade
MacOS users can upgrade device firmware by double-clicking the device row in the Phidget Control Panel.
Linux users can upgrade via the phidget22admin tool (see included readme for instructions).
Windows users can upgrade the firmware for this device using the Phidget Control Panel as shown below.
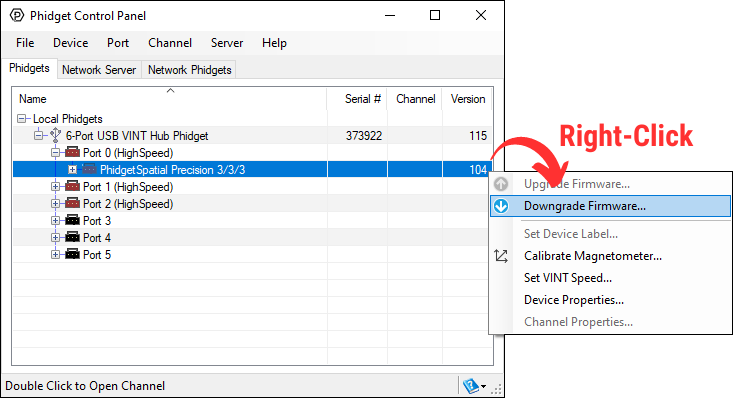
Firmware Downgrade
Firmware upgrades include important bug fixes and performance improvements, but there are some situations where you may want to revert to an old version of the firmware (for instance, when an application you're using is compiled using an older version of phidget22 that doesn't recognize the new firmware).
MacOS and Linux users can downgrade using the phidget22admin tool in the terminal (see included readme for instructions).
Windows users can downgrade directly from the Phidget Control Panel if they have driver version 1.9.20220112 or newer:
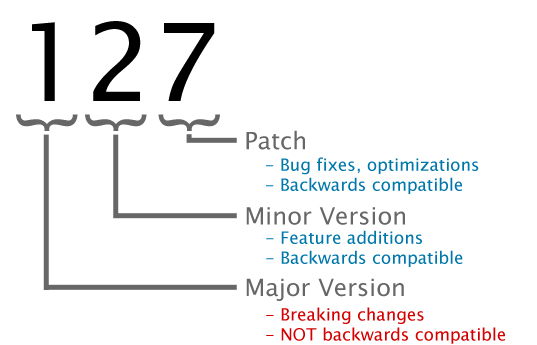
Firmware Version Numbering Schema
Phidgets device firmware is represented by a 3-digit number. For firmware patch notes, see the device history section on the Specifications tab on your device's product page.
The easiest way to determine the minimum and maximum pulse width is to check your servo's datasheet or specification table and use the numbers provided. If you do not have the numbers, you can determine the maximum and minimum pulse width by following this process:
This process is important because selecting a minimum or maximum pulse width that results in the motor stalling could have an impact on the motor's lifespan.
If you have a continuous rotation servo, you do not have to worry about the motor stalling. Increase the maximum and decrease the minimum until you reach the servo's maximum speed.
Many applications call for several servo motors operating in unison - for example, operating a CNC table, or a robot arm. Highly precise synchronization of servos using the RCC1000 is not possible, as the sequencing will be affected by the real-time performance of your operating system. Each servo is controlled as an independent unit, so there is no way of arranging for a particular action to happen to all motors at the same time. Typical jitter can be 10-30mS.
| Board Properties | |
|---|---|
| Controlled By | VINT |
| Driver Support | Phidget22 |
| VINT Communication Speed Max | 10 kbit/s |
| Servo Controller | |
| Number of Motor Ports | 16 |
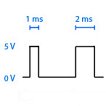
| Pulse Width Min | 63 ns |
| Pulse Width Max | 4 ms |
| Pulse Width Resolution | 63 ns |
| Pulse Code Period | 20 ms |
| Electrical Properties | |
| Supply Voltage Min | 8 V DC |
| Supply Voltage Max | 30 V DC |
| Continuous Motor Current Max | (Total) 20 A |
| Selectable Output Voltage Levels | 5.0, 6.0, 7.4 VDC |
| Current Consumption Max | 20 A |
| Current Consumption Min | 10 mA |
| Output Impedance (Motor) | 100 Ω |
| Replacement Fuse | 20A Slow Blow Blade Type, Standard or Micro |
| Isolation Voltage (DC) | 5 kV DC |
| Physical Properties | |
| Recommended Wire Size | 12 - 24 AWG |
| Operating Temperature Min | -40 °C |
| Operating Temperature Max | 85 °C |
| Customs Information | |
| Canadian HS Export Code | 8471.80.00 |
| American HTS Import Code | 8471.80.40.00 |
| Country of Origin | CN (China) |
| Date | Board Revision | Device Version | Comment |
|---|---|---|---|
| January 2018 | 0 | 106 | Product Release |
| May 2019 | 0 | 110 | Added failsafe functionality |
| June 2019 | 0 | 111 | Fixed spurious "TargetPositionReached" triggers |
| April 2022 | 0 | 120 | Failsafe now resets from any successful packet being sent |
| May 2023 | 0 | 121 | Fixed an issue that could cause the servo to get stuck at an older position |
| Channel Name | API | Channel |
|---|---|---|
| RC Servo Motor Controller | RCServo | 0 - 15 |