Products for USB Sensing and Control







Replaced by the 1040_0B - PhidgetGPS. It is the exact same device, but you can now choose which USB cable you want to have included.
The Phidget GPS provides the longitude and latitude of the board's position in signed decimal degree format. The position accuracy (best case) is 2.5m CEP (Circular Error of Probability).
The 1040 also provides altitude, heading and velocity as well as the time and date. It will also let you know when it has a satellite fix.
The PhidgetGPS has a 3V rechargeable lithium battery to provide "hot starts" by remembering its previous positions. With a live battery, the 1040 can perform a signal re-acquisition in less than 1 second. The battery provides up to 1 month of operation before having to be recharged. Recharging an empty battery takes 24 hours.
| Board Properties | |
|---|---|
| Controlled By | USB |
| USB Stack | HID |
| Driver Support | Phidget21, Phidget22 |
| API Object Name | GPS |
| Position Data Format | Signed Decimal Degree |
| Circular Error Probable (Best Case) | 2.5 m |
| Velocity Error Max | 100 mm/s |
| Timing Error Max | 300 ns |
| Altitude Max | 18 km |
| Velocity Max | 515 m/s |
| Tracking Sensitivity | -161 dBm |
| Re-acquisition Time (Hot Start) | 1 s |
| Update Rate | 10 samples/s |
| Electrical Properties | |
| USB Voltage Min | 4.4 V DC |
| USB Voltage Max | 5.3 V DC |
| Current Consumption Max | 110 mA |
| Backup Battery Life | 1 months |
| Battery Charge Time | 24 h |
| USB Speed | Full Speed |
| Physical Properties | |
| Operating Temperature Min | 0 °C |
| Operating Temperature Max | 70 °C |
| Customs Information | |
| Canadian HS Export Code | 8471.80.00 |
| American HTS Import Code | 8471.80.40.00 |
| Country of Origin | CN (China) |
| Channel Name | API | Channel |
|---|---|---|
| GPS | GPS | 0 |
| API | Detail | Language | OS | |
|---|---|---|---|---|
| GPS | Visual Studio GUI | C# | Windows | Download |
| GPS | Objective-C | macOS | Download | |
| GPS | Swift | macOS | Download | |
| GPS | Swift | iOS | Download | |
| GPS | Visual Basic | Windows | Download | |
| GPS | Max | Multiple | Download |
| Date | Board Revision | Device Version | Comment |
|---|---|---|---|
| March 2011 | 0 | 100 | Product Release, requires phidget21 libraries 2.1.8 or newer |
| May 2011 | 0 | 101 | getLabelString fix for lables > 7 characters |
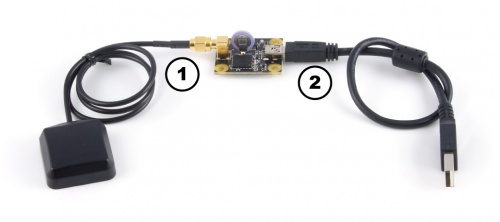
Welcome to the 1040 user guide! In order to get started, make sure you have the following hardware on hand:
Next, you will need to connect the pieces:
Now that you have everything together, let's start using the 1040!
In order to demonstrate the functionality of the 1040, the Phidget Control Panel running on a Windows machine will be used.
The Phidget Control Panel is available for use on both macOS and Windows machines.
To open the Phidget Control Panel on Windows, find the ![]() icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
To open the Phidget Control Panel on macOS, open Finder and navigate to the Phidget Control Panel in the Applications list. Double click on the ![]() icon to bring up the Phidget Control Panel.
icon to bring up the Phidget Control Panel.
For more information, take a look at the getting started guide for your operating system:
Linux users can follow the getting started with Linux guide and continue reading here for more information about the 1040.
After plugging the 1040 into your computer and opening the Phidget Control Panel, you will see something like this:
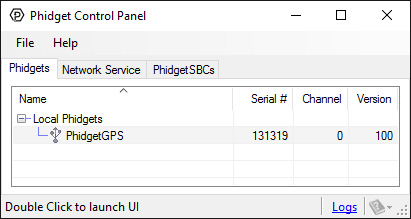
The Phidget Control Panel will list all connected Phidgets and associated objects, as well as the following information:
The Phidget Control Panel can also be used to test your device. Double-clicking on an object will open an example.
Double-click on the GPS object labelled PhidgetGPS in order to run the example:
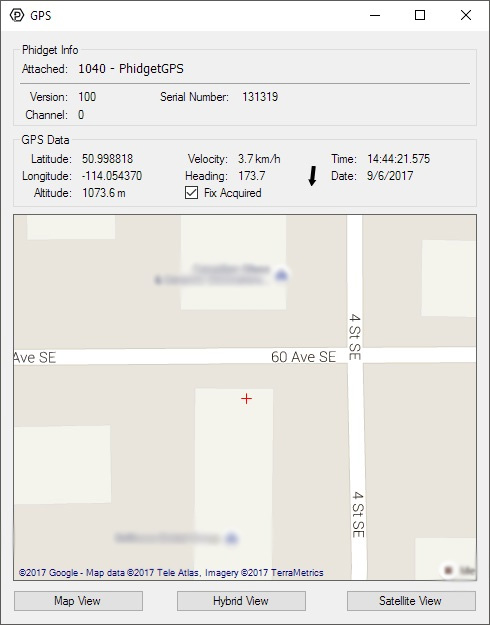
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
Before you can access the device in your own code, and from our examples, you'll need to take note of the addressing parameters for your Phidget. These will indicate how the Phidget is physically connected to your application. For simplicity, these parameters can be found by clicking the button at the top of the Control Panel example for that Phidget.

In the Addressing Information window, the section above the line displays information you will need to connect to your Phidget from any application. In particular, note the Channel Class field as this will be the API you will need to use with your Phidget, and the type of example you should use to get started with it. The section below the line provides information about the network the Phidget is connected on if it is attached remotely. Keep track of these parameters moving forward, as you will need them once you start running our examples or your own code.

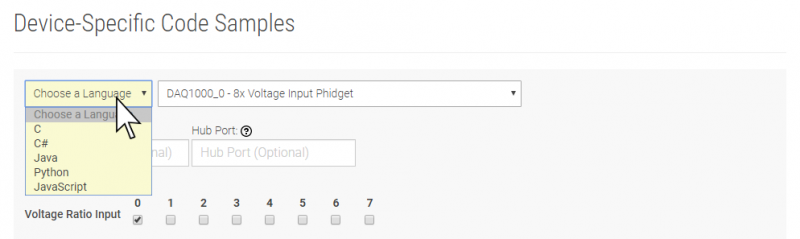
You are now ready to start writing your own code for the device. The best way to do that is to start from our Code Samples.
Select your programming language of choice from the drop-down list to get an example for your device. You can use the options provided to further customize the example to best suit your needs.
Once you have your example, you will need to follow the instructions on the page for your programming language to get it running. To find these instructions, select your programming language from the Programming Languages page.
The 1040 has been sized so it may be mounted directly on top of any of our Spatial Phidgets:
The 1040 does not support WAAS.
For more information, check out the GPS Guide.
Use a USB cable to connect this Phidget to your computer. We have a number of different lengths available, although the maximum length of a USB cable is 5 meters due to limitations in the timing protocol. For longer distances, we recommend that you use a Single Board Computer to control the Phidget remotely.
| Product | Physical Properties | |||
|---|---|---|---|---|
| Part Number | Price | Connector A | Connector B | Cable Length |
 USB-A to Mini-B Cable 28cm 24AWG
|
$3.00 | USB Type A | USB Mini-B | 280 mm |
 USB-A to Mini-B Cable 28cm Right Angle
|
$3.50 | USB Type A | USB Mini-B (90 degree) | 280 mm |
 USB-A to Mini-B Cable 60cm 24AWG
|
$3.50 | USB Type A | USB Mini-B | 600 mm |
 USB-A to Mini-B Cable 83cm Right Angle
|
$4.50 | USB Type A | USB Mini-B (90 degree) | 830 mm |
 USB-A to Mini-B Cable 120cm 24AWG
|
$4.00 | USB Type A | USB Mini-B | 1.2 m |
 USB-A to Mini-B Cable 180cm 24AWG
|
$4.00 | USB Type A | USB Mini-B | 1.8 m |
 USB-A to Mini-B Cable 450cm, 20 AWG 2C
|
$12.00 | USB Type A | USB Mini-B | 4.5 m |
 USB-C to Mini-B Cable 60cm 24AWG
|
$5.00 | USB Type C | USB Mini-B | 600 mm |
 USB-C to Mini-B Cable 180cm 24AWG
|
$6.00 | USB Type C | USB Mini-B | 1.8 m |
The PhidgetGPS can work well with a Phidget Spatial, because data from the two boards can be combined to give you a clearer picture of how the object in question is moving around. For example, the GPS could provide coarse data on where an object is located, and the accelerometer could be used for finer detail in movement. Additionally, the compass data could be compared to the GPS heading for increased accuracy on the direction you are facing. Here are a list of Phidget Spatials:
| Product | Accelerometer | Gyroscope | Magnetometer | ||||
|---|---|---|---|---|---|---|---|
| Part Number | Price | Acceleration Measurement Max | Acceleration Measurement Resolution | Gyroscope Speed Max | Gyroscope Resolution | Magnetometer Resolution | Magnetic Field Max |
 PhidgetSpatial Precision 3/3/3
|
$100.00 | ± 16 g | 30 μg | — | 0.004°/s | 1.5 mG | ± 8 G |
 PhidgetAccelerometer
|
$40.00 | ± 8 g | 250 μg | — | — | — | — |
 Spatial Phidget
|
$30.00 | ± 8 g | 250 μg | — | 0.07°/s | 1.5 mG | ± 8 G |
 Accelerometer Phidget
|
$20.00 | ± 8 g | 1 mg | — | — | — | — |
 PhidgetSpatial Precision 0/0/3 High Resolution
|
$80.00 | ± 2 g | 76.3 μg | — | — | — | — |