

Accelerometer Guide
Discover the basics of accelerometers with this guide. Learn what accelerometers measure, what the measurements mean, how to choose an accelerometer, and more.






Quantity Available: 51
| Qty | Price |
|---|---|
| 10 | $76.00 |
| 25 | $68.00 |
| 50 | $60.00 |
| 100 | $56.00 |
Note: The 1043_1B has the same functionality as the 1043_0B, except that it has a different high-precision accelerometer chip.
The PhidgetSpatial Precision 0/0/3 is a 3-axis accelerometer that can measure up to ±8g of acceleration in each axis, and has high precision when measuring acceleration within ±2g. The transition from high precision to low precision mode and back is completely seamless and automatic.
Use a USB cable to connect this Phidget to your computer. We have a number of different lengths available, although the maximum length of a USB cable is 5 meters due to limitations in the timing protocol. For longer distances, we recommend that you use a Single Board Computer to control the Phidget remotely.
| Product | Physical Properties | |||
|---|---|---|---|---|
| Part Number | Price | Connector A | Connector B | Cable Length |
 USB-A to Mini-B Cable 28cm 24AWG
|
$3.00 | USB Type A | USB Mini-B | 280 mm |
 USB-A to Mini-B Cable 28cm Right Angle
|
$3.50 | USB Type A | USB Mini-B (90 degree) | 280 mm |
 USB-A to Mini-B Cable 60cm 24AWG
|
$3.50 | USB Type A | USB Mini-B | 600 mm |
 USB-A to Mini-B Cable 83cm Right Angle
|
$4.50 | USB Type A | USB Mini-B (90 degree) | 830 mm |
 USB-A to Mini-B Cable 120cm 24AWG
|
$4.00 | USB Type A | USB Mini-B | 1.2 m |
 USB-A to Mini-B Cable 180cm 24AWG
|
$4.00 | USB Type A | USB Mini-B | 1.8 m |
 USB-A to Mini-B Cable 450cm, 20 AWG 2C
|
$12.00 | USB Type A | USB Mini-B | 4.5 m |
 USB-C to Mini-B Cable 60cm 24AWG
|
$5.00 | USB Type C | USB Mini-B | 600 mm |
 USB-C to Mini-B Cable 180cm 24AWG
|
$6.00 | USB Type C | USB Mini-B | 1.8 m |
Welcome to the 1043 user guide! In order to get started, make sure you have the following hardware on hand:
Next, you will need to connect the pieces:

Now that you have everything together, let's start using the 1043!
In order to demonstrate the functionality of the 1043, the Phidget Control Panel running on a Windows machine will be used.
The Phidget Control Panel is available for use on both macOS and Windows machines.
To open the Phidget Control Panel on Windows, find the ![]() icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
icon in the taskbar. If it is not there, open up the start menu and search for Phidget Control Panel
To open the Phidget Control Panel on macOS, open Finder and navigate to the Phidget Control Panel in the Applications list. Double click on the ![]() icon to bring up the Phidget Control Panel.
icon to bring up the Phidget Control Panel.
For more information, take a look at the getting started guide for your operating system:
Linux users can follow the getting started with Linux guide and continue reading here for more information about the 1043.
After plugging the 1043 into your computer and opening the Phidget Control Panel, you will see something like this:
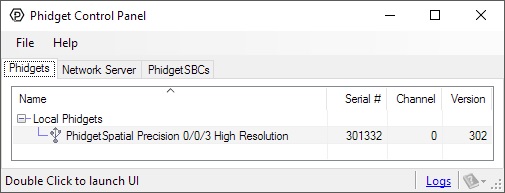
The Phidget Control Panel will list all connected Phidgets and associated objects, as well as the following information:
The Phidget Control Panel can also be used to test your device. Double-clicking on an object will open an example.
Double-click on the Accelerometer object , labelled PhidgetSpatial Precision 0/0/3 High Resolution' in order to run the example:
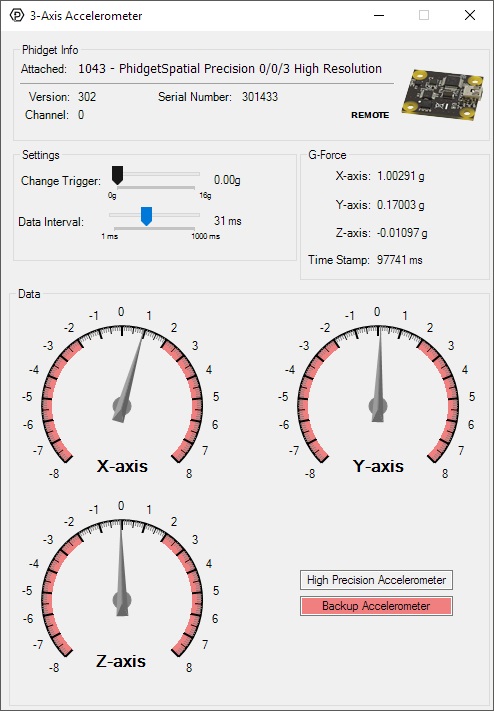
General information about the selected object will be displayed at the top of the window. You can also experiment with the following functionality:
Before you can access the device in your own code, and from our examples, you'll need to take note of the addressing parameters for your Phidget. These will indicate how the Phidget is physically connected to your application. For simplicity, these parameters can be found by clicking the button at the top of the Control Panel example for that Phidget.

In the Addressing Information window, the section above the line displays information you will need to connect to your Phidget from any application. In particular, note the Channel Class field as this will be the API you will need to use with your Phidget, and the type of example you should use to get started with it. The section below the line provides information about the network the Phidget is connected on if it is attached remotely. Keep track of these parameters moving forward, as you will need them once you start running our examples or your own code.

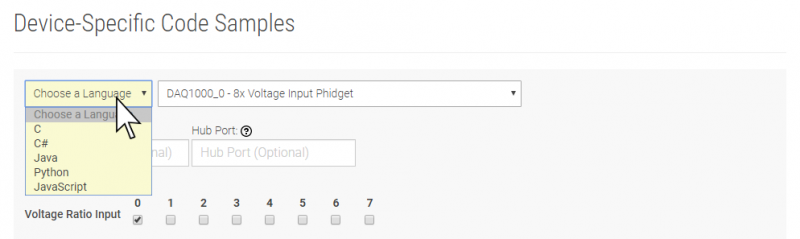
You are now ready to start writing your own code for the device. The best way to do that is to start from our Code Samples.
Select your programming language of choice from the drop-down list to get an example for your device. You can use the options provided to further customize the example to best suit your needs.
Once you have your example, you will need to follow the instructions on the page for your programming language to get it running. To find these instructions, select your programming language from the Programming Languages page.
The 1043 has a 3-Axis accelerometer that can measure ±8 g’s (±78 m/s2) per axis. It will measure both dynamic acceleration (change in velocity) and static acceleration (gravity vector). The Phidgetspatial 3-Axis 0/0/3 is internally calibrated.
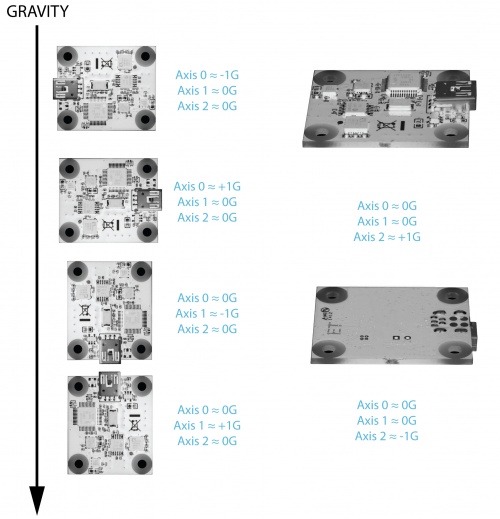
When working with an accelerometer it is important to know which is the positive and negative direction on each of the axes. This can be determined by orienting the accelerometer along each axis and checking the output. The above image shows what the axis readings should be for each orientation of the 1043.
When the PhidgetSpatial High Resolution 0/0/3 measures an acceleration value with magnitude less than 2g, it will acquire its data from a higher precision accelerometer chip. For these measurements, the average white noise on each axis will be reduced by approximately a factor of ten, and the resolution will increase from 976 μg to 76 μg. The transition from normal to high precision or vice-versa is seamless, with no additional code or equations needed.
For more information on testing and calibrating this device, check the Accelerometer Guide.
| Accelerometer | |
|---|---|
| Acceleration Measurement Max | ± 2 g |
| Acceleration Measurement Resolution | 76.3 μg |
| Acceleration Bandwidth | 497 Hz |
| Backup Accelerometer | |
| Acceleration Measurement Max | ± 8 g |
| Acceleration Measurement Resolution | 976.7 μg |
| Board Properties | |
| Controlled By | USB (Mini-USB) |
| USB Stack | HID |
| Driver Support | Phidget21, Phidget22 |
| API Object Name | Accelerometer |
| Current Consumption Max | 35 mA |
| Sampling Speed Min | 1 s/sample |
| Sampling Speed Max | 1 ms/sample |
| Sampling Speed Min (Webservice) | 1 s/sample |
| Sampling Speed Max (Webservice) | 16 ms/sample |
| Analog to Digital Converter Resolution | 16 bit |
| USB Voltage Min | 4.4 V DC |
| USB Voltage Max | 5.3 V DC |
| USB Speed | Full Speed |
| Operating Temperature Min | -40 °C |
| Operating Temperature Max | 85 °C |
| Customs Information | |
| Canadian HS Export Code | 8471.80.00 |
| American HTS Import Code | 8471.80.40.00 |
| Country of Origin | CN (China) |
| Date | Board Revision | Device Version | Packaging Revision | Comment |
|---|---|---|---|---|
| September 2012 | 0 | 300 | Product Release | |
| September 2012 | 0 | 301 | Fixed USB bug | |
| October 2015 | 0 | 302 | OS X El Capitan USB fix | |
| January 2018 | 0 | 302 | B | Added plastic shell enclosure, removed USB cable |
| December 2018 | 1 | 302 | B | Changed precision acceleromter chip |
| Channel Name | API | Channel |
|---|---|---|
| 3-Axis Accelerometer | Accelerometer | 0 |
| Product | Accelerometer | Gyroscope | Magnetometer | ||||
|---|---|---|---|---|---|---|---|
| Part Number | Price | Acceleration Measurement Max | Acceleration Measurement Resolution | Gyroscope Speed Max | Gyroscope Resolution | Magnetometer Resolution | Magnetic Field Max |
 PhidgetSpatial Precision 3/3/3
|
$100.00 | ± 16 g | 30 μg | — | 0.004°/s | 1.5 mG | ± 8 G |
 PhidgetAccelerometer
|
$40.00 | ± 8 g | 250 μg | — | — | — | — |
 Spatial Phidget
|
$30.00 | ± 8 g | 250 μg | — | 0.07°/s | 1.5 mG | ± 8 G |
 Accelerometer Phidget
|
$20.00 | ± 8 g | 1 mg | — | — | — | — |
 PhidgetSpatial Precision 0/0/3 High Resolution
|
$80.00 | ± 2 g | 76.3 μg | — | — | — | — |