Products for USB Sensing and Control

Replaced by the 3340_0, the same motor with a rear shaft and encoder mounting holes.
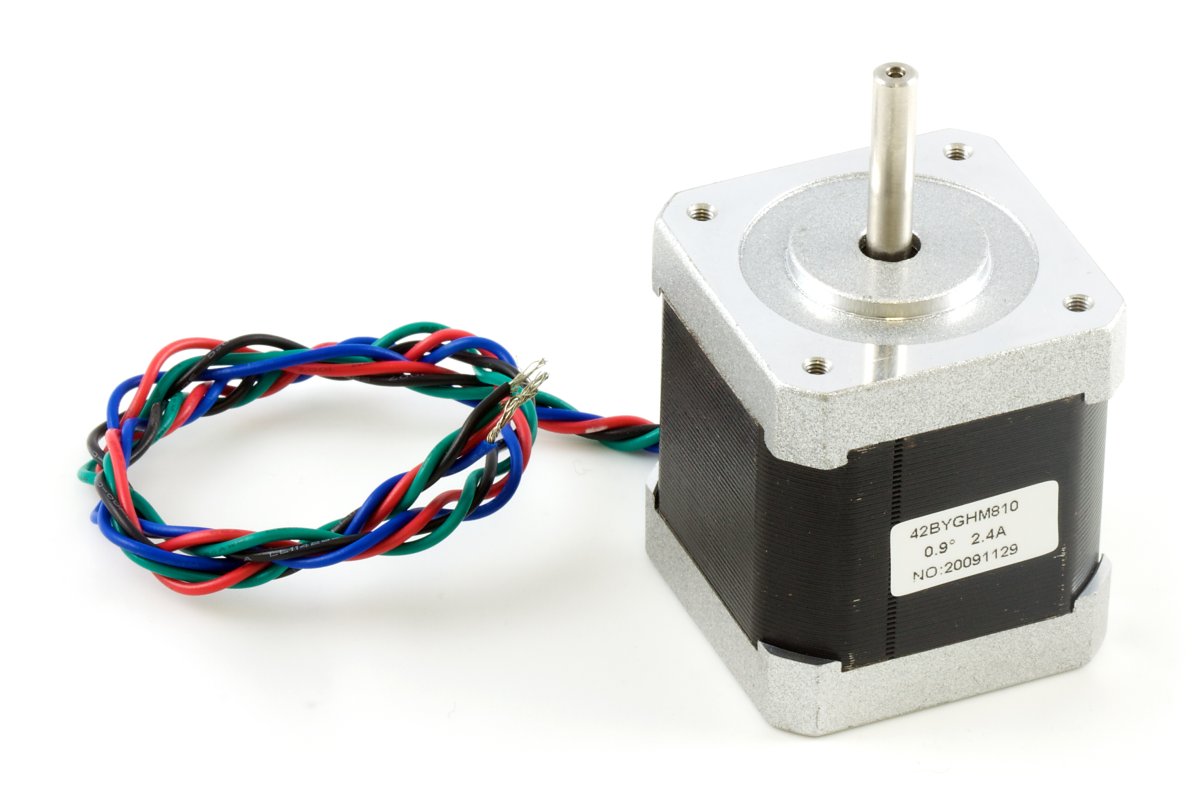
This motor is a larger NEMA-17 motor that produces a whopping 4800g-cm of holding torque and fine resolution. The motor is also very efficient in converting current into torque and velocity.
| Motor Properties | |
|---|---|
| Motor Type | Bipolar Stepper |
| Manufacturer Part Number | 42BYGHM810 |
| Step Angle | 0.9° |
| Step Accuracy | 5 % |
| Holding Torque | 4.8 kg·cm |
| Rated Torque | 4.3 kg·cm |
| Maximum Speed (w/1063 Motor Controller) | 300 RPM |
| Maximum Motor Speed | 2344 RPM |
| Acceleration at Max Speed (w/1067 Motor Controller) |
2.4E+06 1⁄16 steps/sec² |
| Electrical Properties | |
| Recommended Voltage | 12 V DC |
| Rated Current | 2.4 A |
| Coil Resistance | 1 Ω |
| Phase Inductance | 1.8 mH |
| Physical Properties | |
| Shaft Diameter | 5 mm |
| Mounting Plate Size | NEMA - 17 |
| Weight | 362 g |
| Number of Leads | 4 |
| Wire Length | 300 mm |
| Customs Information | |
| Canadian HS Export Code | 8501.10.00 |
| American HTS Import Code | 8501.10.40.60 |
| Country of Origin | CN (China) |
The 3302 stepper motor connects to a bipolar motor controller such as the 1067 - PhidgetStepper Bipolar HC.
The following diagram shows how to connect the motor wires to the board connectors to produce a clockwise rotation in the stepper motor when increasing position. To wire for counter-clockwise rotation when increasing position, reverse the red and blue wires.
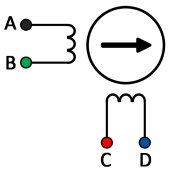
Note: Make sure to unplug the power cord from the motor controller before switching wires around.

|
Connecting the motor directly to a power supply will destroy the motor and void the warranty. If you want to check your motor make sure it is connected to a constant current / chopper drive controller. |
The mounting holes on this motor are compatible with the 3338 - Mounting Bracket (NEMA17).