Servo Motor and Controller Guide
Learn about servo motors and servo motor controllers in this guide, including: how servo motors work, how to choose a servo motor, types of servo motors, and more.






Quantity Available: 222
| Qty | Price |
|---|---|
| 5 | $17.28 |
| 10 | $16.56 |
The 3212 is a standard servo that has been built specifically for continuous rotation (up to 60 RPM at 4.8 V), and it produces a lot of torque (12 kg-cm at 4.8 V). It features two ball bearings on the output shaft for reduced friction, and it offers easy access to the rest-point adjustment potentiometer. Essentially, it is a gear motor whose velocity can be controlled by an RC servo controller. It is not normally used as an actuator, as there is no way of commanding it to move to a particular position, as a standard RC servo does.
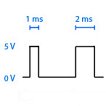
The 3212 continuous rotation servo converts RC servo position pulses into continuous rotation speed. The default rest point is 1.5 ms, but this can be adjusted by using a small slotted screwdriver to turn the middle-point positioner. Pulse widths above the rest point result in counterclockwise rotation, with speed increasing as the pulse width increases; pulse widths below the rest point result in clockwise rotation, with speed increasing as the pulse width decreases.
RC servos are hobbyist remote control servos typically used in radio-controlled models, where they provide actuation for various mechanical systems such as the steering of a car, the flaps on a plane, or the rudder of a boat. These servos are not industrial grade and are not recommended for continuous heavy use.

This servo motor needs to be connected to a servo controller board. If you're looking for higher torque, you should select a servo controller with an external power jack so it doesn't have to rely solely on USB power, which is limited. You can plug this servo directly to any of the boards in the list below by matching the color of the wire with the label on the board. Note that some servos have a white data wire and others have a yellow one- in both cases this wire corresponds to the "W" pin on the servo controllers.
| Motor Properties | |
|---|---|
| Motor Type | Continuous Rotation Servo |
| Rated Torque | 12.2 kg·cm |
| Rated Speed | 50 RPM |
| Physical Properties | |
| Gear Train Material | Metal |
| Bearing Type | Double Ball Bearing |
| Motor Length | 39.5 mm |
| Motor Width | 42 mm |
| Motor Depth | 20.5 mm |
| Wire Length | 280 mm |
| Weight | 60 g |
| Electrical Properties | |
| Rated Voltage | 5 V DC |
| Rated Current (on 1061 controller) | 155 mA |
| Rated Current (on 1066 controller) | 165 mA |
| Stall Current (on 1061 controller) | 1.8 A |
| Stall Current (on 1066 controller) | 417 mA |
| Customs Information | |
| Canadian HS Export Code | 8501.10.00 |
| American HTS Import Code | 8501.10.40.60 |
| Country of Origin | CN (China) |
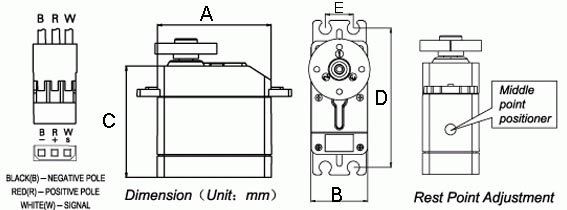
| A | B | C | D | E |
| 42.0mm | 20.5mm | 39.5mm | 49.0 | 10.0mm |
| Product | Motor Properties | ||||
|---|---|---|---|---|---|
| Part Number | Price | Motor Type | Range of Rotation | Rated Torque | Rated Speed |
 Hitec Deluxe Servo
|
$13.00 | Limited Rotation Servo | 180° | 3 kg·cm | 286°/s |
 Hitec Continuous Rotation Servo
|
$18.75 | Continuous Rotation Servo | — | 2.8 kg·cm | 44 RPM |
 Hitec Mega Sail Servo
|
$52.00 | Limited Rotation Servo | 180° | 19.8 kg·cm | 125°/s |
 Hitec Super Torque Servo
|
$40.50 | Limited Rotation Servo | 180° | 7.7 kg·cm | 300°/s |
 Hitec Winch Servo
|
$57.75 | Limited Rotation Servo | Approx. 2700° | 11 kg·cm | 225°/s |
 SpringRC Standard Servo
|
$8.00 | Limited Rotation Servo | 180° | 3.5 kg·cm | 400°/s |
 SpringRC Small Servo
|
$10.00 | Limited Rotation Servo | 180° | 2.4 kg·cm | 375°/s |
 SpringRC High Torque Continuous Rotation Servo
|
$18.00 | Continuous Rotation Servo | — | 12.2 kg·cm | 50 RPM |



