Tilt Controlled Rover
Learn how to use an accelerometer to control your Phidget Rover!

Prerequisites
Make sure you have completed the following projects before starting
Parts
Make sure you have all the parts before moving on.
Note: you can use any Phidget with an accelerometer for this project.




VINT Hub Phidget

Setup
Step 1
You should have an assembled rover.

Step 2
Connect your Spatial Phidget to a wired VINT Hub. Connect the wired VINT Hub to your computer.
Do not connect the Spatial Phidget directly to your rover.

Write Code (Java)
Not your programming language? Set your preferences so we can display relevant code examples
package phidgetsrover;
//Add Phidgets Library
import com.phidget22.*;
public class PhidgetsRover {
public static void main(String[] args) throws Exception{
//Connect to wireless rover
Net.addServer("", "192.168.100.1", 5661, "", 0);
//Create
DCMotor leftMotors = new DCMotor();
DCMotor rightMotors = new DCMotor();
Accelerometer acceleration = new Accelerometer();
//Address
leftMotors.setChannel(0);
rightMotors.setChannel(1);
//Open
leftMotors.open(5000);
rightMotors.open(5000);
acceleration.open(1000);
//Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration());
rightMotors.setAcceleration(rightMotors.getMaxAcceleration());
//Use your Phidgets
while (true){
//Get axis information
double x = acceleration.getAcceleration()[0];
double z = acceleration.getAcceleration()[2];
//Calculate tilt angle
double pitch = Math.round(Math.toDegrees(Math.atan(x/z)));
System.out.println("Angle: " + pitch + "°");
//Convert angle to value between -1 and 1
double motorVelocity = pitch/90.0;
//Move rover
leftMotors.setTargetVelocity(motorVelocity);
rightMotors.setTargetVelocity(motorVelocity);
//Wait for 250 milliseconds
Thread.sleep(250);
}
}
}
//Add Phidgets Library
import com.phidget22.*;
public class PhidgetsRover {
public static void main(String[] args) throws Exception{
//Connect to wireless rover
Net.addServer("", "192.168.100.1", 5661, "", 0);
//Create
DCMotor leftMotors = new DCMotor();
DCMotor rightMotors = new DCMotor();
Accelerometer acceleration = new Accelerometer();
//Address
leftMotors.setChannel(0);
rightMotors.setChannel(1);
//Open
leftMotors.open(5000);
rightMotors.open(5000);
acceleration.open(1000);
//Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration());
rightMotors.setAcceleration(rightMotors.getMaxAcceleration());
//Use your Phidgets
while (true){
//Get axis information
double x = acceleration.getAcceleration()[0];
double z = acceleration.getAcceleration()[2];
//Calculate tilt angle
double pitch = Math.round(Math.toDegrees(Math.atan(x/z)));
System.out.println("Angle: " + pitch + "°");
//Convert angle to value between -1 and 1
double motorVelocity = pitch/90.0;
//Move rover
leftMotors.setTargetVelocity(motorVelocity);
rightMotors.setTargetVelocity(motorVelocity);
//Wait for 250 milliseconds
Thread.sleep(250);
}
}
}
//Add Phidgets Library
import com.phidget22.*;
//Define
DCMotor leftMotors;
DCMotor rightMotors;
Accelerometer acceleration;
void setup(){
try{
//Connect to wireless rover
Net.addServer("","192.168.100.1", 5661,"",0);
//Create
leftMotors = new DCMotor();
rightMotors = new DCMotor();
acceleration = new Accelerometer();
//Address
leftMotors.setChannel(0);
rightMotors.setChannel(1);
//Open
leftMotors.open(5000);
rightMotors.open(5000);
acceleration.open(5000);
//Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration());
rightMotors.setAcceleration(rightMotors.getMaxAcceleration());
}catch(Exception e){
//Handle Exceptions
e.printStackTrace();
}
}
void draw(){
try{
//Get axis information
double x = acceleration.getAcceleration()[0];
double z = acceleration.getAcceleration()[2];
//Calculate tilt angles
double pitch = Math.round(Math.toDegrees(Math.atan(x/z)));
println("Angle: " + pitch + "°");
//Convert angle to value between -1 and 1
double motorVelocity = pitch/90.0;
//Move Rover
leftMotors.setTargetVelocity(motorVelocity);
rightMotors.setTargetVelocity(motorVelocity);
//Wait 250 milliseconds
delay(250);
}catch(Exception e){
//Handle Exceptions
e.printStackTrace();
}
}
Write Code (Python)
Not your programming language? Set your preferences so we can display relevant code examples.
#Add Phidgets library
from Phidget22.Phidget import *
from Phidget22.Net import *
from Phidget22.Devices.Accelerometer import *
from Phidget22.Devices.DCMotor import *
#Required for sleep statement
import time
#Required for atan
import math
#Connect to your rover
Net.addServer("", "192.168.100.1", 5661, "", 0)
#Create
leftMotors = DCMotor()
rightMotors = DCMotor()
accel = Accelerometer()
#Address
leftMotors.setChannel(0)
rightMotors.setChannel(1)
#Open
leftMotors.openWaitForAttachment(5000)
rightMotors.openWaitForAttachment(5000)
accel.openWaitForAttachment(1000)
#Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration())
rightMotors.setAcceleration(rightMotors.getMaxAcceleration())
#Use your Phidgets
while (True):
#Get axes information
x = accel.getAcceleration()[0]
z = accel.getAcceleration()[2]
#Calculate tilt angle
pitch = round(math.degrees(math.atan(x/z)))
print("Angle: " + str(pitch) + "°")
#Convert angle to value between -1 and 1
motorVelocity = pitch/90
#Move rover
leftMotors.setTargetVelocity(motorVelocity)
rightMotors.setTargetVelocity(motorVelocity)
#Wait for 250 milliseconds
time.sleep(0.25)
Write Code (C#)
Not your programming language? Set your preferences so we can display relevant code examples
//Add Phidgets Library
using Phidget22;
namespace PhidgetsRover
{
class Program
{
static void Main(string[] args)
{
//Connect to wireless rover
Net.AddServer("", "192.168.100.1", 5661, "", 0);
//Create
DCMotor leftMotors = new DCMotor();
DCMotor rightMotors = new DCMotor();
Accelerometer accel = new Accelerometer();
//Address
leftMotors.Channel = 0;
rightMotors.Channel = 1;
//Open
leftMotors.Open(5000);
rightMotors.Open(5000);
accel.Open(1000);
//Increase acceleration
leftMotors.Acceleration = leftMotors.MaxAcceleration;
rightMotors.Acceleration = rightMotors.MaxAcceleration;
//Use your Phidgets
while (true)
{
// Get axes information
double x = accel.Acceleration[0];
double z = accel.Acceleration[2];
//calculate tilt angles
double pitch = System.Math.Round((System.Math.Atan(x / z)) * (180.0 / System.Math.PI));
System.Console.WriteLine("Angle: " + pitch + "°");
//Convert angle to value between -1 and 1
double motorVelocity = pitch / 90.0;
//Move rover
leftMotors.TargetVelocity = motorVelocity;
rightMotors.TargetVelocity = motorVelocity;
//Wait for 250 milliseconds
System.Threading.Thread.Sleep(250);
}
}
}
}
Write Code (Swift)
Swift code sample coming soon. Not your programming language? Set your preferences so we can display relevant code examples
Run Your Program
When you tilt your Spatial Phidget, your rover will respond by moving forward or backwards.
Calculating Tilt Angles
Your Spatial Phidget has an accelerometer that measures acceleration in three axes. You can use this data to calculate tilt angles which can then be used to control your rover.
As shown in the image, gravity remains constant when the position/acceleration values of each axis changes. We can use the constant position of gravity to find out the angle of the roll and pitch.

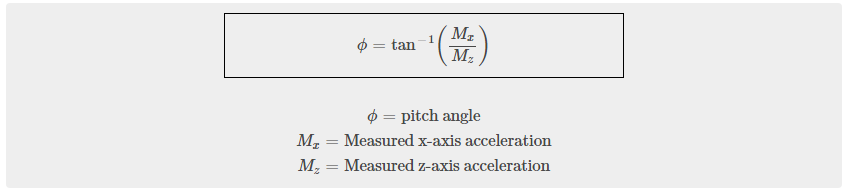
Pitch
Pitch is the side to side movement.

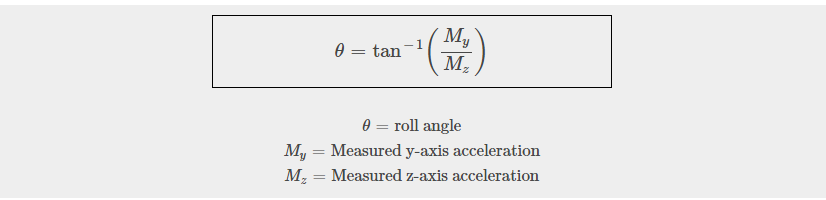
Roll
Roll is the forward and backward movement.

Equations
The following equations are used to calculate pitch and roll in the provided code sample.
Practice
- View the pitch values output from your program to understand how the equations work. What is the output range of the pitch and how is it modified to set the velocity?
- Try running the code below, and completing the next set of practice problems.
Write Code (Java)
Not your programming language? Set your preferences so we can display relevant code examples
package phidgetsrover;
//Add Phidgets Library
import com.phidget22.*;
public class PhidgetsRover {
public static void main(String[] args) throws Exception{
//Connect to wireless rover
Net.addServer("", "192.168.100.1", 5661, "", 0);
//Create
DCMotor leftMotors = new DCMotor();
DCMotor rightMotors = new DCMotor();
Accelerometer acceleration = new Accelerometer();
//Address
leftMotors.setChannel(0);
rightMotors.setChannel(1);
//Open
leftMotors.open(5000);
rightMotors.open(5000);
acceleration.open(1000);
//Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration());
rightMotors.setAcceleration(rightMotors.getMaxAcceleration());
//Use your Phidgets
while (true){
//Get axes information
double x = acceleration.getAcceleration()[0];
double y = acceleration.getAcceleration()[1];
double z = acceleration.getAcceleration()[2];
//calculate tilt angles
double roll = Math.round(Math.toDegrees(Math.atan(y/z)));
double pitch = Math.round(Math.toDegrees(Math.atan(x/z)));
System.out.println("Roll Angle: " + roll + "°");
System.out.println("Pitch Angle: " + pitch + "°");
//Convert angles into values between -1 and 1
roll = roll/90.0;
pitch = pitch/90.0;
//Turning code
double leftMotorsSpeed = pitch + roll;
double rightMotorsSpeed = pitch - roll;
//Make sure input to the target velocity is between -1 and 1
if(leftMotorsSpeed > 1) leftMotorsSpeed = 1;
if(leftMotorsSpeed < -1) leftMotorsSpeed = -1;
if(rightMotorsSpeed > 1) rightMotorsSpeed = 1;
if(rightMotorsSpeed < -1) rightMotorsSpeed = -1;
//Move rover
leftMotors.setTargetVelocity(leftMotorsSpeed);
rightMotors.setTargetVelocity(rightMotorsSpeed);
//Wait for 250 milliseconds
Thread.sleep(250);
}
}
}
//Add Phidgets Library
import com.phidget22.*;
public class PhidgetsRover {
public static void main(String[] args) throws Exception{
//Connect to wireless rover
Net.addServer("", "192.168.100.1", 5661, "", 0);
//Create
DCMotor leftMotors = new DCMotor();
DCMotor rightMotors = new DCMotor();
Accelerometer acceleration = new Accelerometer();
//Address
leftMotors.setChannel(0);
rightMotors.setChannel(1);
//Open
leftMotors.open(5000);
rightMotors.open(5000);
acceleration.open(1000);
//Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration());
rightMotors.setAcceleration(rightMotors.getMaxAcceleration());
//Use your Phidgets
while (true){
//Get axes information
double x = acceleration.getAcceleration()[0];
double y = acceleration.getAcceleration()[1];
double z = acceleration.getAcceleration()[2];
//calculate tilt angles
double roll = Math.round(Math.toDegrees(Math.atan(y/z)));
double pitch = Math.round(Math.toDegrees(Math.atan(x/z)));
System.out.println("Roll Angle: " + roll + "°");
System.out.println("Pitch Angle: " + pitch + "°");
//Convert angles into values between -1 and 1
roll = roll/90.0;
pitch = pitch/90.0;
//Turning code
double leftMotorsSpeed = pitch + roll;
double rightMotorsSpeed = pitch - roll;
//Make sure input to the target velocity is between -1 and 1
if(leftMotorsSpeed > 1) leftMotorsSpeed = 1;
if(leftMotorsSpeed < -1) leftMotorsSpeed = -1;
if(rightMotorsSpeed > 1) rightMotorsSpeed = 1;
if(rightMotorsSpeed < -1) rightMotorsSpeed = -1;
//Move rover
leftMotors.setTargetVelocity(leftMotorsSpeed);
rightMotors.setTargetVelocity(rightMotorsSpeed);
//Wait for 250 milliseconds
Thread.sleep(250);
}
}
}
//Add Phidgets Library
import com.phidget22.*;
//Define
DCMotor leftMotors;
DCMotor rightMotors;
Accelerometer acceleration;
void setup(){
try{
//Connect to wireless rover
Net.addServer("","192.168.100.1", 5661,"",0);
//Create
leftMotors = new DCMotor();
rightMotors = new DCMotor();
acceleration = new Accelerometer();
//Address
leftMotors.setChannel(0);
rightMotors.setChannel(1);
//Open
leftMotors.open(5000);
rightMotors.open(5000);
acceleration.open(5000);
//Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration());
rightMotors.setAcceleration(rightMotors.getMaxAcceleration());
}catch(Exception e){
//Handle Exceptions
e.printStackTrace();
}
}
void draw(){
try{
//Get axis information
double x = acceleration.getAcceleration()[0];
double y = acceleration.getAcceleration()[1];
double z = acceleration.getAcceleration()[2];
//Calculate tilt angles
double roll = Math.toDegrees(Math.atan(y/z));
double pitch = Math.toDegrees(Math.atan(x/z));
println("Roll Angle: " + roll + "°");
println("Pitch Angle: " + pitch + "°");
//Convert angles into values between -1 and 1
roll = roll/90.0;
pitch = pitch/90.0;
double leftMotorSpeed = pitch + roll;
double rightMotorSpeed = pitch - roll;
//Make sure input to the target velocity is between -1 and 1
if(leftMotorSpeed > 1) leftMotorSpeed = 1;
if(leftMotorSpeed < -1) leftMotorSpeed = -1;
if(rightMotorSpeed > 1) rightMotorSpeed = 1;
if(rightMotorSpeed < -1) rightMotorSpeed = -1;
//Move Rover
leftMotors.setTargetVelocity(leftMotorSpeed);
rightMotors.setTargetVelocity(rightMotorSpeed);
//Wait for 250 milliseconds
delay(250);
}catch(Exception e){
//Handle Exceptions
e.printStackTrace();
}
}
Write Code (Python)
Not your programming language? Set your preferences so we can display relevant code examples.
#Add Phidgets Library
from Phidget22.Phidget import *
from Phidget22.Net import *
from Phidget22.Devices.Accelerometer import *
from Phidget22.Devices.DCMotor import *
#Required for sleep statement
import time
#Required for atan
import math
#Connect to your rover
Net.addServer("", "192.168.100.1", 5661, "", 0)
#Create
leftMotors = DCMotor()
rightMotors = DCMotor()
accel = Accelerometer()
#Address
leftMotors.setChannel(0)
rightMotors.setChannel(1)
#Open
leftMotors.openWaitForAttachment(5000)
rightMotors.openWaitForAttachment(5000)
accel.openWaitForAttachment(1000)
#Increase acceleration
leftMotors.setAcceleration(leftMotors.getMaxAcceleration())
rightMotors.setAcceleration(rightMotors.getMaxAcceleration())
#Use your Phidgets
while (True):
#Get axes information
x = accel.getAcceleration()[0]
y = accel.getAcceleration()[1]
z = accel.getAcceleration()[2]
#Calculate tilt angles
roll = round(math.degrees(math.atan(y/z)))
pitch = round(math.degrees(math.atan(x/z)))
print("Roll Angle: " + str(roll) + "°")
print("Pitch Angle: " + str(pitch) + "°")
#Convert angles to values between -1 and 1
roll = roll/90
pitch = pitch/90
#Turning code
leftMotorsSpeed = pitch + roll
rightMotorsSpeed = pitch - roll
#Make sure input to the target velocity is between -1 and 1
if(leftMotorsSpeed > 1): leftMotorsSpeed = 1
if(leftMotorsSpeed < -1): leftMotorsSpeed = -1
if(rightMotorsSpeed > 1): rightMotorsSpeed = 1
if(rightMotorsSpeed < -1): rightMotorsSpeed = -1
#Move rover
leftMotors.setTargetVelocity(leftMotorsSpeed)
rightMotors.setTargetVelocity(rightMotorsSpeed)
#Wait 250 milliseconds
time.sleep(0.25)
Write Code (C#)
Not your programming language? Set your preferences so we can display relevant code examples
//Add Phidgets Library
using Phidget22;
namespace PhidgetsRover
{
class Program
{
static void Main(string[] args)
{
//Connect to wireless rover
Net.AddServer("", "192.168.100.1", 5661, "", 0);
//Create
DCMotor leftMotors = new DCMotor();
DCMotor rightMotors = new DCMotor();
Accelerometer accel = new Accelerometer();
//Address
leftMotors.Channel = 0;
rightMotors.Channel = 1;
//Open
accel.Open(1000);
leftMotors.Open(5000);
rightMotors.Open(5000);
//Increase acceleration
leftMotors.Acceleration = leftMotors.MaxAcceleration;
rightMotors.Acceleration = rightMotors.MaxAcceleration;
//Use your Phidgets
while (true)
{
//Get axes information
double x = accel.Acceleration[0];
double y = accel.Acceleration[1];
double z = accel.Acceleration[2];
//Calculate tilt angles
double roll = ((System.Math.Atan(y / z)) * (180.0 / System.Math.PI));
double pitch = ((System.Math.Atan(x / z)) * (180.0 / System.Math.PI));
System.Console.WriteLine("Roll Angle: " + roll + "°");
System.Console.WriteLine("Pitch Angle: " + pitch + "°");
//Convert angles into values between -1 and 1
roll = roll / 90.0;
pitch = pitch / 90.0;
//Turning code
double leftMotorsSpeed = pitch + roll;
double rightMotorsSpeed = pitch - roll;
//Make sure input to the target velocity is between -1 and 1
if (leftMotorsSpeed > 1) leftMotorsSpeed = 1;
if (leftMotorsSpeed < -1) leftMotorsSpeed = -1;
if (rightMotorsSpeed > 1) rightMotorsSpeed = 1;
if (rightMotorsSpeed < -1) rightMotorsSpeed = -1;
leftMotors.TargetVelocity = leftMotorsSpeed;
rightMotors.TargetVelocity = rightMotorsSpeed;
//Wait for 250 milliseconds
System.Threading.Thread.Sleep(250);
}
}
}
}
Write Code (Swift)
Swift code sample coming soon. Not your programming language? Set your preferences so we can display relevant code examples
Run Your Program
When you tilt your Spatial Phidget, your rover will move forward and backwards, and will also turn.
Practice
- Try understanding how the turning code works by completing the following table.
double leftMotorsSpeed = pitch + roll;
double rightMotorsSpeed = pitch - roll;
leftMotorsSpeed = pitch+ roll
rightMotorsSpeed = pitch- roll
double leftMotorsSpeed = pitch + roll;
double rightMotorsSpeed = pitch - roll;
| pitch | roll | leftMotorsSpeed | rightMotorsSpeed | Result |
|---|---|---|---|---|
| 1.0 | 0.0 | 1.0 | 1.0 | Move Forward |
| -1.0 | 0.0 | ? | ? | ? |
| 0.0 | 1.0 | ? | ? | ? |
| 0.0 | -1.0 | ? | ? | ? |