Step 1
Take your motor chassis out of the kit.

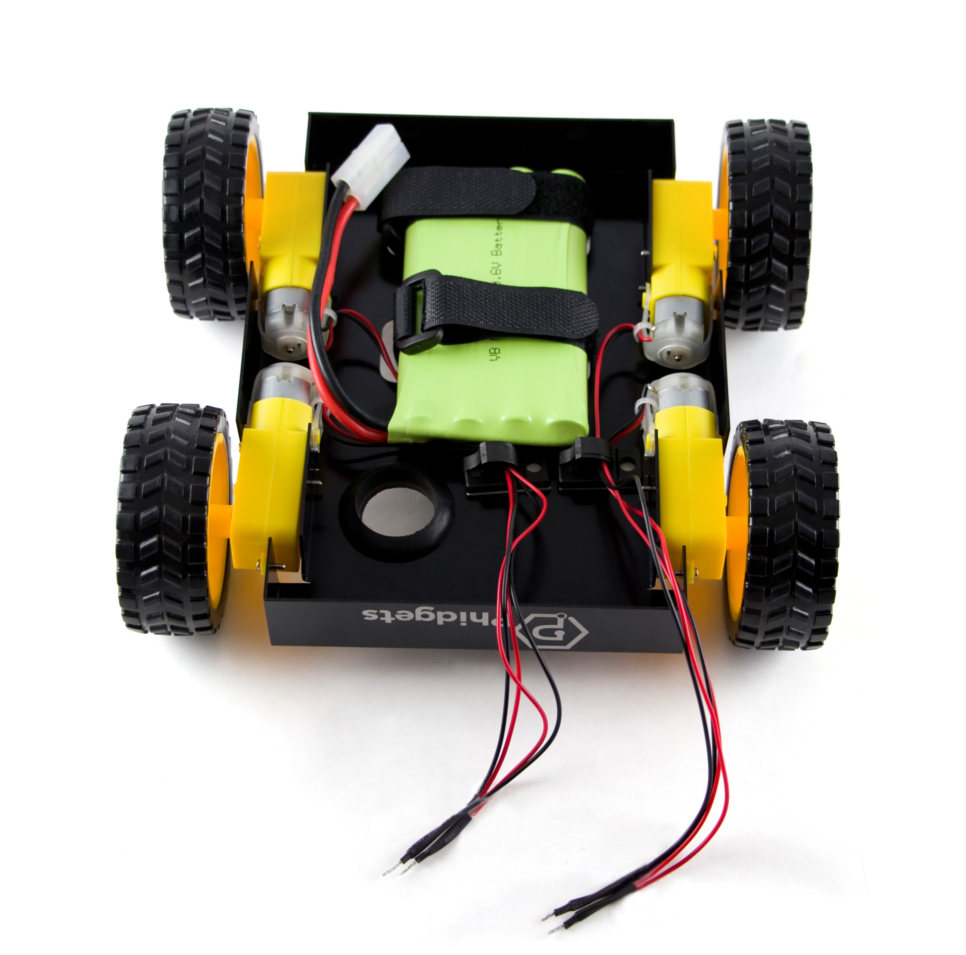
Step 2
Turn the chassis over. You will see the battery is already secured with a velcro strap.

Step 3
Place a piece of dual lock on the chassis as shown in the image.

Step 4
Place another piece of dual lock on the bottom of the 2x DC Motor Phidget.

Step 5
Secure it to the motor chassis.

Step 6
Turn the chassis over again, and identify the two sets of motor wires.
Step 7
Pull one set of wires through to the top of the chassis.

Step 8
Using the screwdriver, connect the wire pair as shown. Red to + and black to - .

Step 9
Pull the other wire pair through and connect the wires in a similar fashion.

Step 10
Take the wire harness out from your kit.

Step 11
Connect the red wire to VCC and the black wire to GND.

Step 12
Next, place a piece of dual lock on the Sonar Phidget and on the Rover chassis as shown.
Step 13
Secure the Sonar Phidget to the chassis.

Step 14
Place a piece of dual lock on the Wireless VINT Hub and on the Rover chassis as shown.
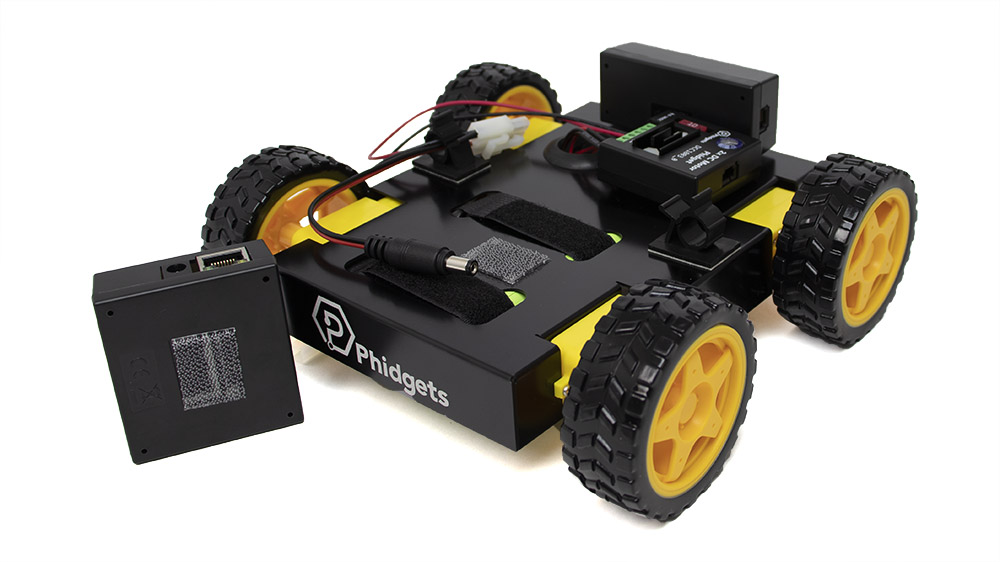
Step 15
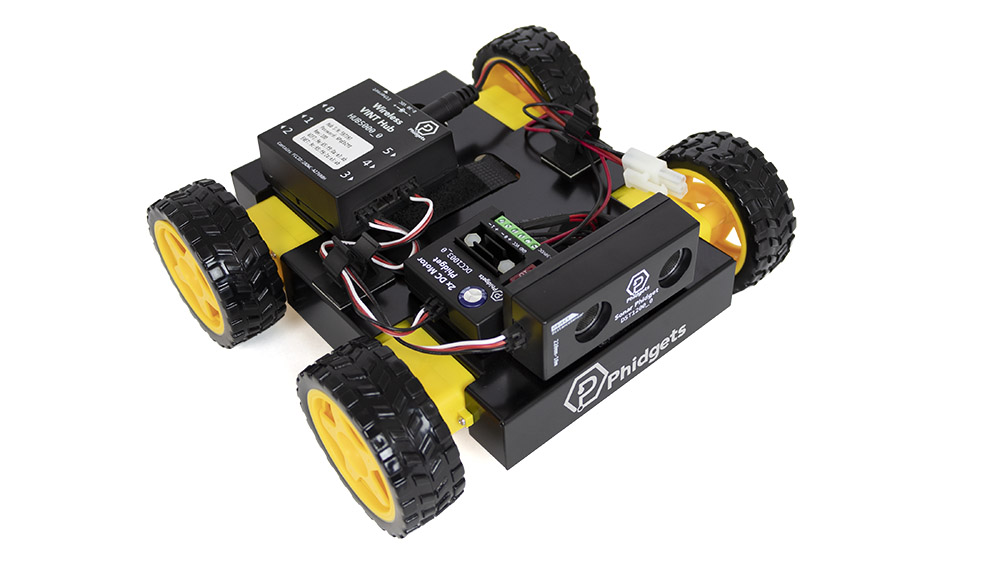
Secure the Wireless VINT Hub to the Rover chassis. Connect the Wireless VINT Hub to the wiring harness as shown.
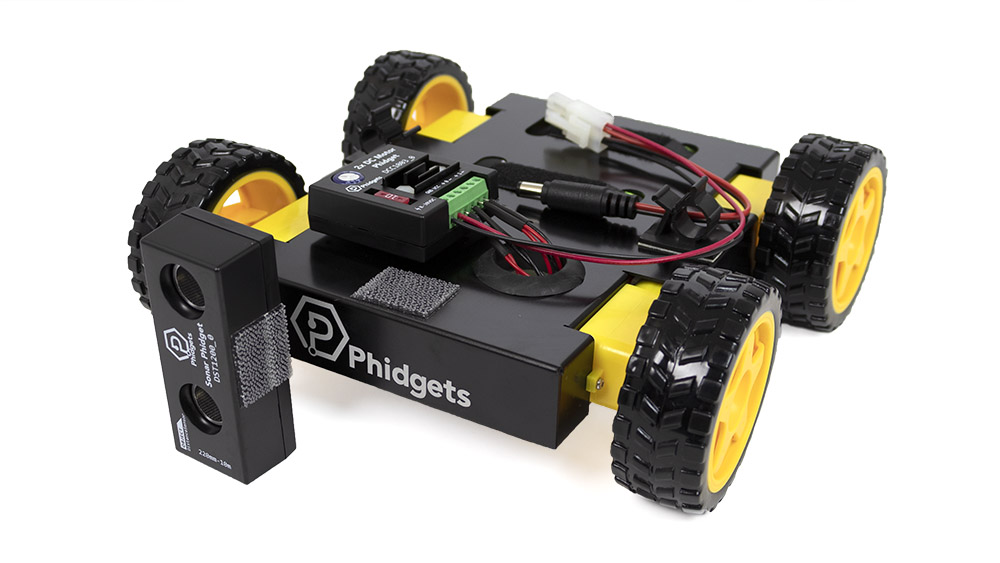
Step 16
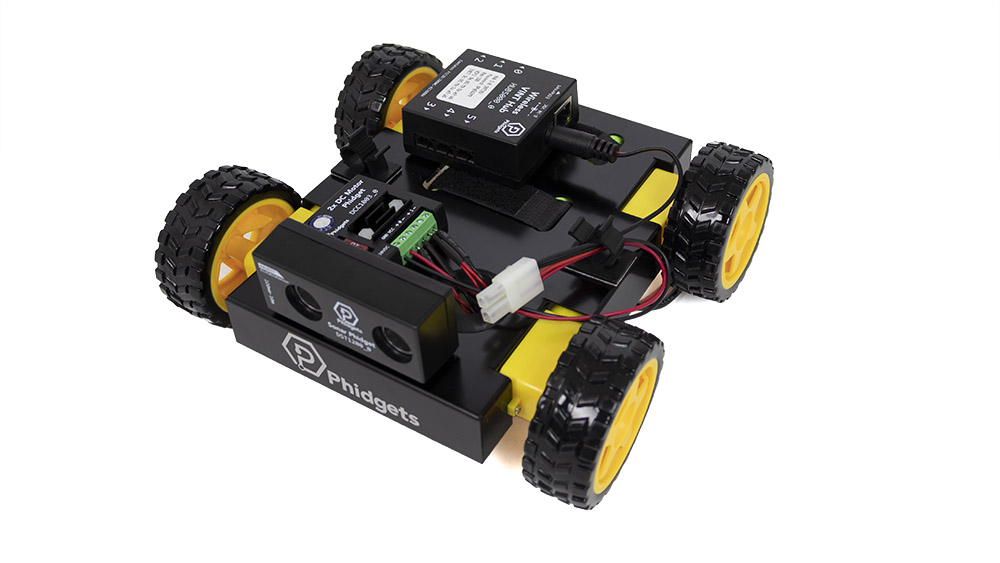
Connect the Sonar Phidget to Hub Port 3 using a Phidget Cable.

Step 17
Connect the 2x DC Motor Phidget to Hub Port 5 using a Phidget Cable.
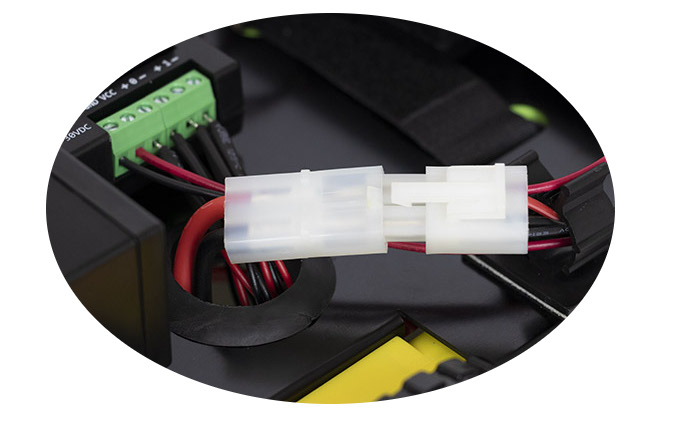
Step 18
Finally, power your Rover by connecting the battery to the wire harness. Pull the battery connector through to the top of the Rover in order to connect.
Note: When you are not using the Rover it is recommended that you disconnect the battery.