Products for USB Sensing and Control










Quantity Available: 931
| Qty | Price |
|---|---|
| 5 | $9.50 |
| 10 | $9.00 |
| 25 | $8.00 |
| 50 | $7.00 |
| 100 | $6.50 |
| 250 | $6.00 |
| 500 | $5.50 |
| 1000 | $5.00 |
| 50+ | ... |
The ENC4109 is an affordable optical quadrature encoder. This device is great for projects that require motor position control.

This quadrature encoder must be read by an encoder interface. These interfaces will interpret the two quadrature signals in order to determine the continuous position of the rotating part. The following interfaces are compatible with this encoder:
| Product | Encoder Interface | ||
|---|---|---|---|
| Part Number | Price | Number of Encoder Inputs | Count Rate Max |
 Quadrature Encoder Phidget
|
$15.00 | 1 | 1E+06 pulses/s |
 4A DC Motor Phidget
|
$40.00 | 1 | 400000 pulses/s |
 DC Motor Phidget
|
$75.00 | 1 | 400000 pulses/s |
 PhidgetEncoder HighSpeed
|
$50.00 | 1 | 1E+06 pulses/s |
 PhidgetEncoder HighSpeed 4-Input
|
$75.00 | 4 | 1E+06 pulses/s |
 PhidgetEncoder HighSpeed
|
$40.00 | 1 | 2E+06 pulses/s |
 PhidgetEncoder HighSpeed 4-Input
|
$65.00 | 4 | 1E+06 pulses/s |
 PhidgetMotorControl 1-Motor
|
$75.00 | 1 | 500000 cycles/s |
Here is a complete list of all motors sold at Phidgets that have mounting holes on the rear shaft that are compatible with this encoder:
| Product | Motor Properties | Gearbox Properties | ||
|---|---|---|---|---|
| Part Number | Price | Rated Torque | Motor Type | Gear Ratio |
 12V/17.3Kg-cm/18RPM 139:1 DC Gear Motor
|
$43.00 | 17.3 kg·cm | DC Motor | — |
 24V/2.5Kg-cm/3280RPM DC Motor
|
$40.00 | 4 kg·cm | DC Motor | — |
 24V/4.3Kg-cm/3000RPM DC Motor
|
$50.00 | 8.7 kg·cm | DC Motor | — |
 24V/6Kg-cm/3200RPM DC Motor
|
$60.00 | 11.4 kg·cm | DC Motor | — |
 24V/5.1Kg-cm/588RPM 4.25:1 DC Gear Motor
|
$69.00 | 4.4 kg·cm | DC Motor | — |
 NEMA11 - 1.8 Degree - 0.67A Stepper - Gearless
|
$16.00 | 520 g·cm | Bipolar Stepper | — |
 24V/10Kg-cm/772RPM/4.25:1 DC Gear Motor
|
$80.00 | 12.2 kg·cm | DC Motor | — |
 24V/14.2Kg-cm/192RPM 13:1 DC Gear Motor
|
$66.00 | 13.3 kg·cm | DC Motor | — |
 24V/45Kg-cm/182RPM/18:1 DC Gear Motor
|
$82.00 | 47 kg·cm | DC Motor | — |
 24V/50.9Kg-cm/53RPM 47:1 DC Gear Motor
|
$72.00 | 43.8 kg·cm | DC Motor | — |
 NEMA11 - 1.8 Degree - 0.67A Stepper - 27:1 Gearbox
|
$36.00 | 14 kg·cm | Bipolar Stepper | 26 103⁄121 : 1 |
 24V/162Kg-cm/50RPM/65:1 DC Gear Motor
|
$84.00 | 153 kg·cm | DC Motor | — |
 24V/82.6Kg-cm/33RPM 76:1 DC Gear Motor
|
$72.00 | 71.4 kg·cm | DC Motor | — |
 NEMA11 - 1.8 Degree - 0.67A Stepper - 100:1 Gearbox
|
$38.00 | 32 kg·cm | Bipolar Stepper | 99 1044⁄2057 : 1 |
 NEMA14 - 1.8 Degree - 1A Stepper - Gearless
|
$16.00 | 1.2 kg·cm | Bipolar Stepper | — |
 NEMA17 - 1.8 Degree - 1.68A Stepper - Gearless
|
$16.00 | 3.3 kg·cm | Bipolar Stepper | — |
 24V/173.3Kg-cm/15RPM 168:1 DC Gear Motor
|
$76.00 | 136.6 kg·cm | DC Motor | — |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 5.18:1 Gearbox
|
$40.00 | 18 kg·cm | Bipolar Stepper | 5 2⁄11 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 14:1 Gearbox
|
$42.00 | 30 kg·cm | Bipolar Stepper | 13 212⁄289 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 27:1 Gearbox
|
$44.00 | 30 kg·cm | Bipolar Stepper | 26 103⁄121 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 51:1 Gearbox
|
$46.00 | 48 kg·cm | Bipolar Stepper | 50 4397⁄4913 : 1 |
 NEMA17 - 1.8 Degree - 1.68A Stepper - 100:1 Gearbox
|
$48.00 | 48 kg·cm | Bipolar Stepper | 99 1044⁄2057 : 1 |
 NEMA23 - 0.9 Degree - 2.8A Stepper - Gearless
|
$28.00 | 11.2 kg·cm | Bipolar Stepper | — |
 NEMA23 - 1.8 Degree - 2.8A Stepper - 4.25:1 Gearbox
|
$70.00 | 46.6 kg·cm | Bipolar Stepper | 4 1⁄4 : 1 |
 NEMA23 - 1.8 Degree - 2.8A Stepper - 15:1 Gearbox
|
$72.00 | 150 kg·cm | Bipolar Stepper | 15 3⁄10 : 1 |
 NEMA23 - 1.8 Degree - 2.8A Stepper - 77:1 Gearbox
|
$74.00 | 240 kg·cm | Bipolar Stepper | 76 49⁄64 : 1 |
 NEMA34 - 1.8 Degree - 4A Stepper - Gearless
|
$60.00 | 30 kg·cm | Bipolar Stepper | — |
If you need a replacement encoder cable, you can find one below:
| Product | Physical Properties | |
|---|---|---|
| Part Number | Price | Cable Length |
 Cable for HKT22 Encoder
|
$3.00 | 500 mm |

|
You should have received:
|
In order to test your new Phidget you will also need:
| |
|
Take the plastic base, the encoder PCB, and two screws. Use the longer 8mm screws if they fit your motor, or the 6mm screws if those are too long. Place the PCB inside the base in the orientation shown above so that it fits in. Place the combined base and PCB on the back of the motor such that the mounting holes line up with the holes in the base. There are two orientations possible- use whichever is more convenient for motor wiring. Place the screws in the two holes in the PCB and screw until the base and PCB are firmly attached, being careful not to over-tighten and damage the pieces. |
| |
|
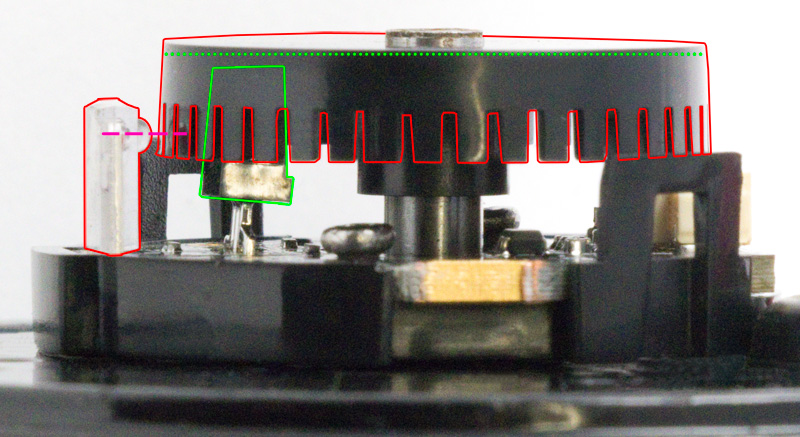
Take the plastic encoder wheel and place it on the shaft with the comb-shaped edge facing the motor. Slowly slide the wheel onto the shaft until the combs are aligned with the bubble on the optical sensor (Outlined in red below). Be careful not to push so far that the wheel is contacting components on the PCB (outlined in green below).
|
|
|
Take the plastic cap and align the hole with the white connector. Press the cap on so that the tabs on either side click in. |
| |
|
Attach the cable to the white connector. You may need to push on either side with your fingernail or a screwdriver to ensure that it's fully inserted. |
| |
|
For further instructions, visit the user guide for the motor controller and encoder interface Phidget that you're using. |
|
| Encoder Properties | |
|---|---|
| Controlled By | Encoder Interface |
| Output Circuit Type | Push-Pull |
| Encoder Speed Max | 6000 RPM |
| Encoder Resolution | 40 CPR |
| Electrical Properties | |
| Supply Voltage Min | 4.2 V DC |
| Supply Voltage Max | 5.5 V DC |
| Output Frequency Max | 12.5 kHz |
| Physical Properties | |
| Shaft Diameter | (Inner) 4 mm |
| Operating Temperature Min | -40 °C |
| Operating Temperature Max | 85 °C |
| IP Rating | IP65 |
| Customs Information | |
| Canadian HS Export Code | 9029.10.00 |
| American HTS Import Code | 9029.10.80.00 |
| Country of Origin | CN (China) |
| Date | Board Revision | Device Version | Comment |
|---|---|---|---|
| February 2018 | 0 | N/A | Product Release |
| Product | Encoder Properties | |||
|---|---|---|---|---|
| Part Number | Price | Output Circuit Type | Encoder Resolution | Encoder Speed Max |
 Rotary Encoder - 12mm Hollow Shaft 1000CPR with Index
|
$50.00 | Push-Pull | 1000 CPR | 6000 RPM |
 Rotary Encoder - 12mm Solid Shaft 1000CPR with Index
|
$60.00 | Push-Pull | 1000 CPR | 2000 RPM |
 Rotary Encoder - 6mm Solid Shaft 1000CPR with Index
|
$40.00 | Push-Pull | 1000 CPR | 6000 RPM |
 Rotary Encoder - 6mm Solid Shaft 600CPR
|
$25.00 | Push-Pull | 600 CPR | 6000 RPM |
 Rotary Encoder - 8mm Solid Shaft 1000CPR with Index
|
$45.00 | Push-Pull | 1000 CPR | 6000 RPM |
 Rotary Encoder - For 4mm Motor Shaft 300 CPR
|
$25.00 | Push-Pull | 300 CPR | 6000 RPM |
 Rotary Encoder - For 4mm Motor Shaft 40 CPR
|
$10.00 | Push-Pull | 40 CPR | 6000 RPM |
 Rotary Encoder - For 5mm Motor Shaft 1000CPR
|
$30.00 | Push-Pull | 1000 CPR | 5000 RPM |
 Rotary Encoder with 4mm Shaft (360 CPR)
|
$50.00 | Push-Pull | 360 CPR | 3000 RPM |
 Rotary Encoder with 8mm Bore (500 CPR)
|
$50.00 | Push-Pull | 500 CPR | 4500 RPM |